 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Reprojection: Closing the Loop for Pose-aware ShapeReconstruction from a Single Image
Jul 26, 2017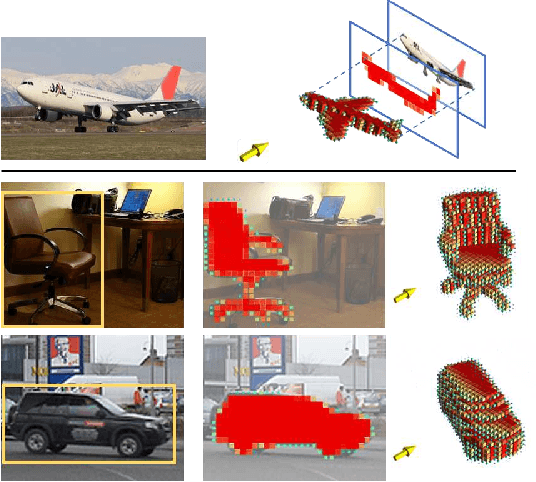
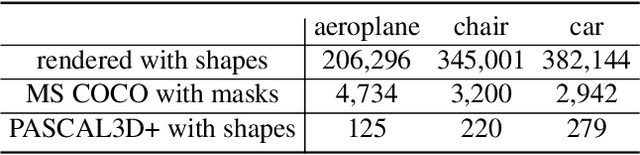
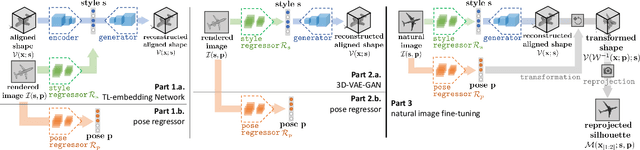
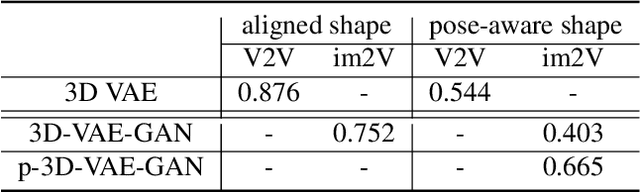
An emerging problem in computer vision is the reconstruction of 3D shape and pose of an object from a single image. Hitherto, the problem has been addressed through the application of canonical deep learning methods to regress from the image directly to the 3D shape and pose labels. These approaches, however, are problematic from two perspectives. First, they are minimizing the error between 3D shapes and pose labels - with little thought about the nature of this label error when reprojecting the shape back onto the image. Second, they rely on the onerous and ill-posed task of hand labeling natural images with respect to 3D shape and pose. In this paper we define the new task of pose-aware shape reconstruction from a single image, and we advocate that cheaper 2D annotations of objects silhouettes in natural images can be utilized. We design architectures of pose-aware shape reconstruction which re-project the predicted shape back on to the image using the predicted pose. Our evaluation on several object categories demonstrates the superiority of our method for predicting pose-aware 3D shapes from natural images.
Deep-LK for Efficient Adaptive Object Tracking
May 30, 2017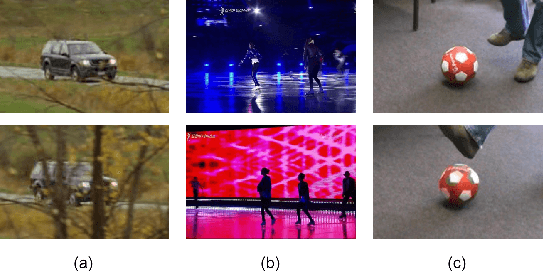
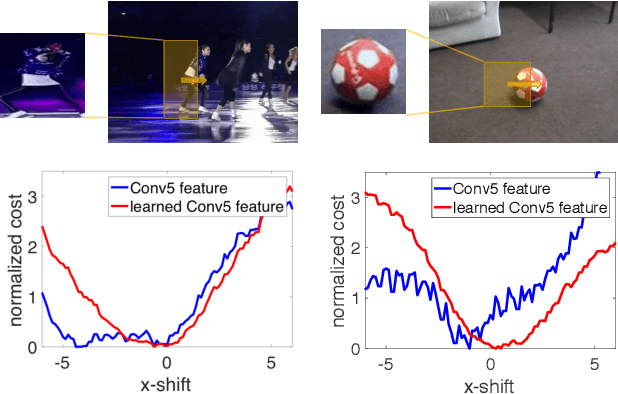
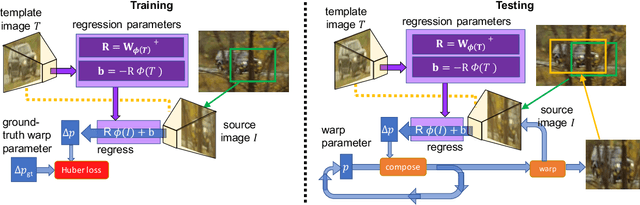
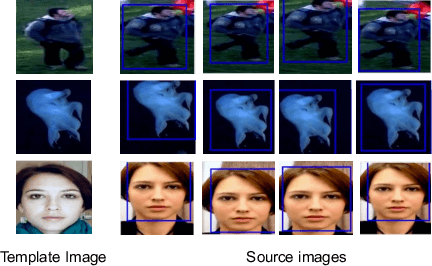
In this paper we present a new approach for efficient regression based object tracking which we refer to as Deep- LK. Our approach is closely related to the Generic Object Tracking Using Regression Networks (GOTURN) framework of Held et al. We make the following contributions. First, we demonstrate that there is a theoretical relationship between siamese regression networks like GOTURN and the classical Inverse-Compositional Lucas & Kanade (IC-LK) algorithm. Further, we demonstrate that unlike GOTURN IC-LK adapts its regressor to the appearance of the currently tracked frame. We argue that this missing property in GOTURN can be attributed to its poor performance on unseen objects and/or viewpoints. Second, we propose a novel framework for object tracking - which we refer to as Deep-LK - that is inspired by the IC-LK framework. Finally, we show impressive results demonstrating that Deep-LK substantially outperforms GOTURN. Additionally, we demonstrate comparable tracking performance to current state of the art deep-trackers whilst being an order of magnitude (i.e. 100 FPS) computationally efficient.
Learning Background-Aware Correlation Filters for Visual Tracking
Mar 21, 2017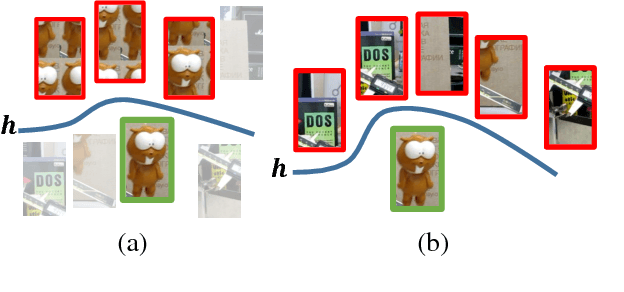

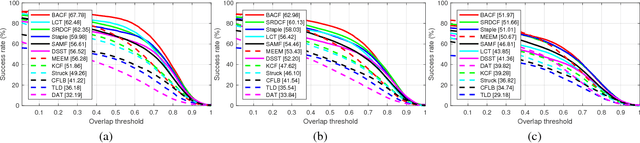
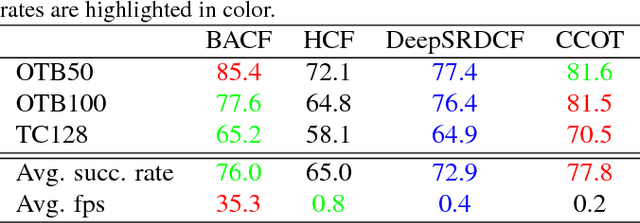
Correlation Filters (CFs) have recently demonstrated excellent performance in terms of rapidly tracking objects under challenging photometric and geometric variations. The strength of the approach comes from its ability to efficiently learn - "on the fly" - how the object is changing over time. A fundamental drawback to CFs, however, is that the background of the object is not be modelled over time which can result in suboptimal results. In this paper we propose a Background-Aware CF that can model how both the foreground and background of the object varies over time. Our approach, like conventional CFs, is extremely computationally efficient - and extensive experiments over multiple tracking benchmarks demonstrate the superior accuracy and real-time performance of our method compared to the state-of-the-art trackers including those based on a deep learning paradigm.
Need for Speed: A Benchmark for Higher Frame Rate Object Tracking
Mar 21, 2017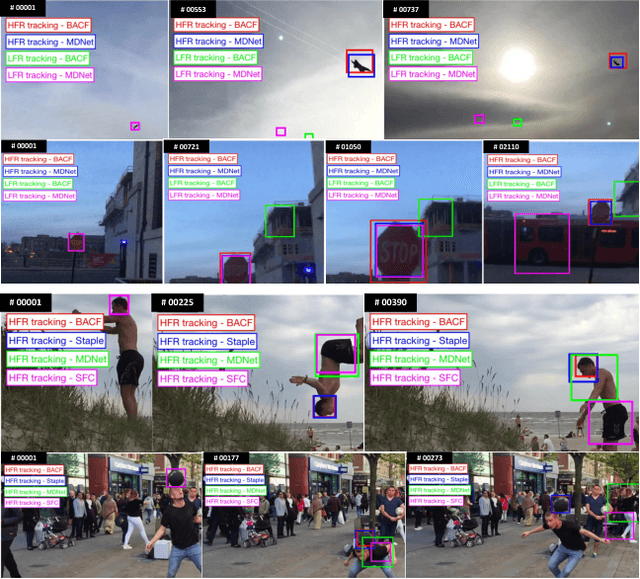
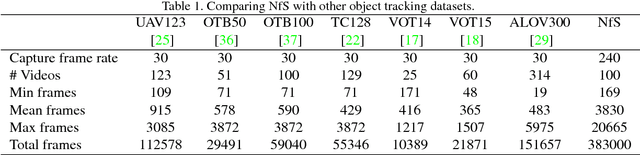
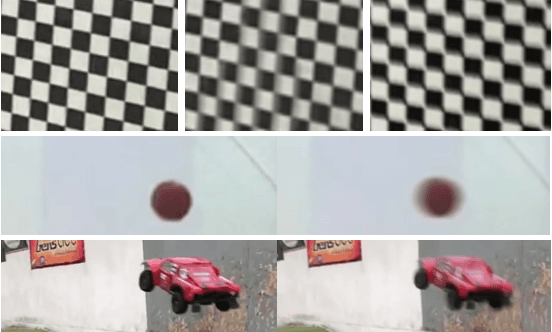
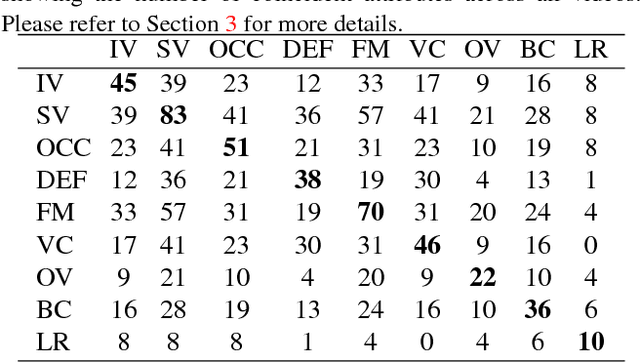
In this paper, we propose the first higher frame rate video dataset (called Need for Speed - NfS) and benchmark for visual object tracking. The dataset consists of 100 videos (380K frames) captured with now commonly available higher frame rate (240 FPS) cameras from real world scenarios. All frames are annotated with axis aligned bounding boxes and all sequences are manually labelled with nine visual attributes - such as occlusion, fast motion, background clutter, etc. Our benchmark provides an extensive evaluation of many recent and state-of-the-art trackers on higher frame rate sequences. We ranked each of these trackers according to their tracking accuracy and real-time performance. One of our surprising conclusions is that at higher frame rates, simple trackers such as correlation filters outperform complex methods based on deep networks. This suggests that for practical applications (such as in robotics or embedded vision), one needs to carefully tradeoff bandwidth constraints associated with higher frame rate acquisition, computational costs of real-time analysis, and the required application accuracy. Our dataset and benchmark allows for the first time (to our knowledge) systematic exploration of such issues, and will be made available to allow for further research in this space.
Correlation Filters with Limited Boundaries
Mar 31, 2014
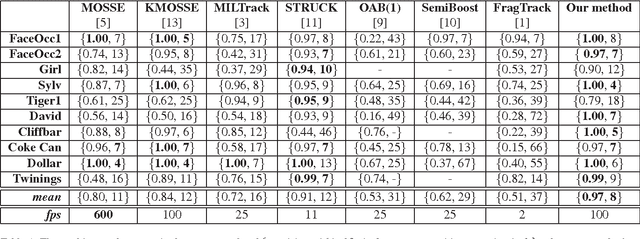
Correlation filters take advantage of specific properties in the Fourier domain allowing them to be estimated efficiently: O(NDlogD) in the frequency domain, versus O(D^3 + ND^2) spatially where D is signal length, and N is the number of signals. Recent extensions to correlation filters, such as MOSSE, have reignited interest of their use in the vision community due to their robustness and attractive computational properties. In this paper we demonstrate, however, that this computational efficiency comes at a cost. Specifically, we demonstrate that only 1/D proportion of shifted examples are unaffected by boundary effects which has a dramatic effect on detection/tracking performance. In this paper, we propose a novel approach to correlation filter estimation that: (i) takes advantage of inherent computational redundancies in the frequency domain, and (ii) dramatically reduces boundary effects. Impressive object tracking and detection results are presented in terms of both accuracy and computational efficiency.