 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFusionLoc: Camera-2D LiDAR Fusion Using Multi-Head Self-Attention for End-to-End Serving Robot Relocalization
Mar 13, 2023With the recent development of autonomous driving technology, as the pursuit of efficiency for repetitive tasks and the value of non-face-to-face services increase, mobile service robots such as delivery robots and serving robots attract attention, and their demands are increasing day by day. However, when something goes wrong, most commercial serving robots need to return to their starting position and orientation to operate normally again. In this paper, we focus on end-to-end relocalization of serving robots to address the problem. It is to predict robot pose directly from only the onboard sensor data using neural networks. In particular, we propose a deep neural network architecture for the relocalization based on camera-2D LiDAR sensor fusion. We call the proposed method FusionLoc. In the proposed method, the multi-head self-attention complements different types of information captured by the two sensors. Our experiments on a dataset collected by a commercial serving robot demonstrate that FusionLoc can provide better performances than previous relocalization methods taking only a single image or a 2D LiDAR point cloud as well as a straightforward fusion method concatenating their features.
MitoVis: A Visually-guided Interactive Intelligent System for Neuronal Mitochondria Analysis
Sep 03, 2021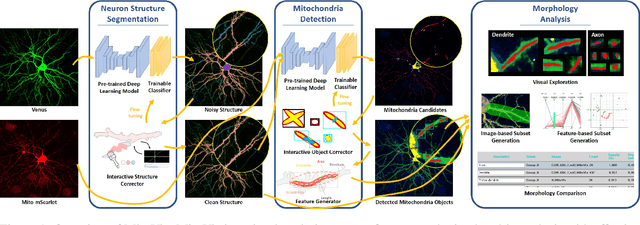
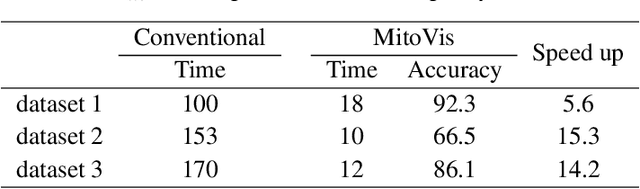


Neurons have a polarized structure, including dendrites and axons, and compartment-specific functions can be affected by dwelling mitochondria. It is known that the morphology of mitochondria is closely related to the functions of neurons and neurodegenerative diseases. Even though several deep learning methods have been developed to automatically analyze the morphology of mitochondria, the application of existing methods to actual analysis still encounters several difficulties. Since the performance of pre-trained deep learning model may vary depending on the target data, re-training of the model is often required. Besides, even though deep learning has shown superior performance under a constrained setup, there are always errors that need to be corrected by humans in real analysis. To address these issues, we introduce MitoVis, a novel visualization system for end-to-end data processing and interactive analysis of the morphology of neuronal mitochondria. MitoVis enables interactive fine-tuning of a pre-trained neural network model without the domain knowledge of machine learning, which allows neuroscientists to easily leverage deep learning in their research. MitoVis also provides novel visual guides and interactive proofreading functions so that the users can quickly identify and correct errors in the result with minimal effort. We demonstrate the usefulness and efficacy of the system via a case study conducted by a neuroscientist on a real analysis scenario. The result shows that MitoVis allows up to 15x faster analysis with similar accuracy compared to the fully manual analysis method.