 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Layer Separation using Light Field Imaging
Jun 15, 2015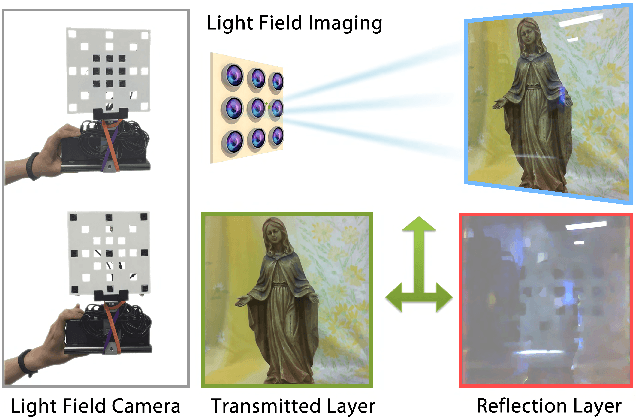
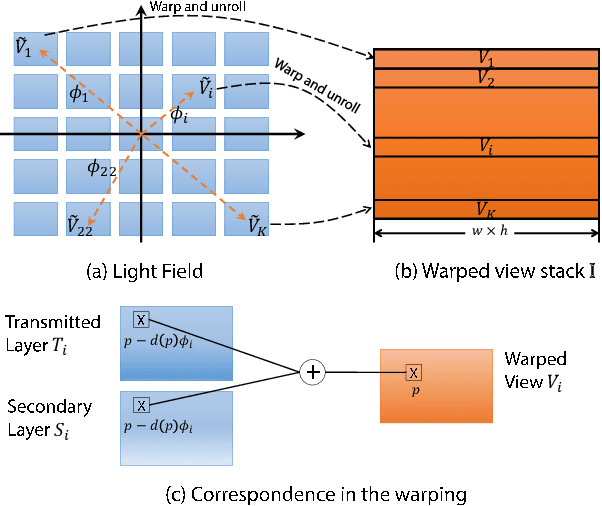
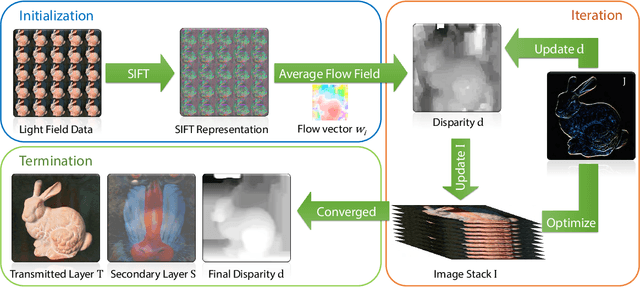
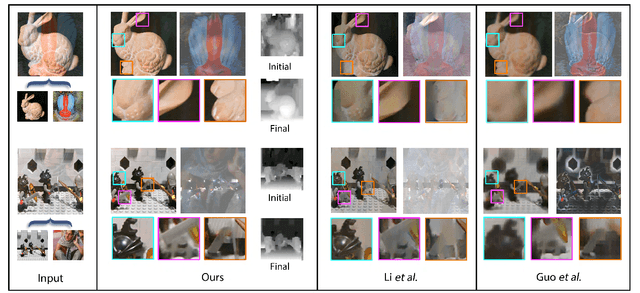
We propose a novel approach that jointly removes reflection or translucent layer from a scene and estimates scene depth. The input data are captured via light field imaging. The problem is couched as minimizing the rank of the transmitted scene layer via Robust Principle Component Analysis (RPCA). We also impose regularization based on piecewise smoothness, gradient sparsity, and layer independence to simultaneously recover 3D geometry of the transmitted layer. Experimental results on synthetic and real data show that our technique is robust and reliable, and can handle a broad range of layer separation problems.
Resolving Scale Ambiguity Via XSlit Aspect Ratio Analysis
Jun 14, 2015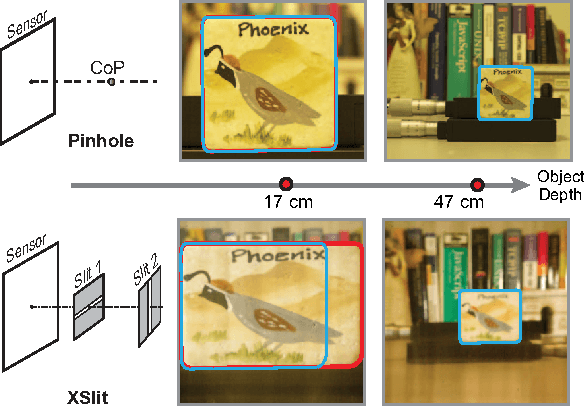

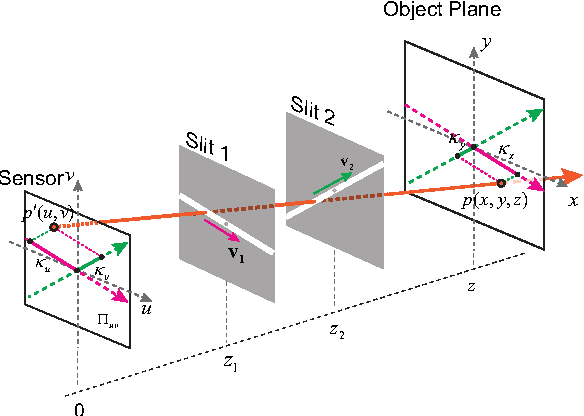
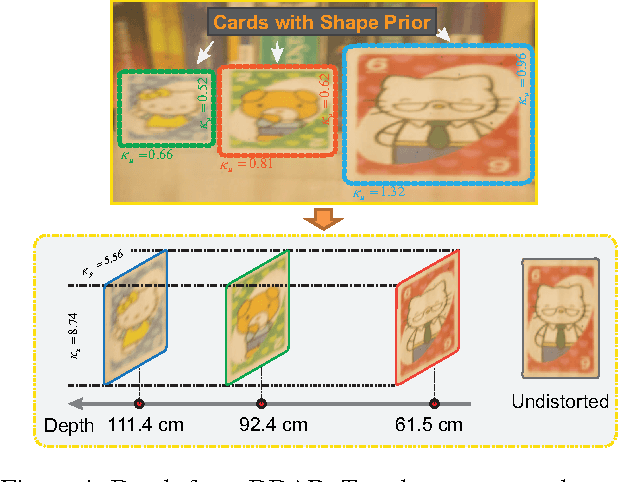
In perspective cameras, images of a frontal-parallel 3D object preserve its aspect ratio invariant to its depth. Such an invariance is useful in photography but is unique to perspective projection. In this paper, we show that alternative non-perspective cameras such as the crossed-slit or XSlit cameras exhibit a different depth-dependent aspect ratio (DDAR) property that can be used to 3D recovery. We first conduct a comprehensive analysis to characterize DDAR, infer object depth from its AR, and model recoverable depth range, sensitivity, and error. We show that repeated shape patterns in real Manhattan World scenes can be used for 3D reconstruction using a single XSlit image. We also extend our analysis to model slopes of lines. Specifically, parallel 3D lines exhibit depth-dependent slopes (DDS) on their images which can also be used to infer their depths. We validate our analyses using real XSlit cameras, XSlit panoramas, and catadioptric mirrors. Experiments show that DDAR and DDS provide important depth cues and enable effective single-image scene reconstruction.