 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Evaluation For Offline Learning: Are We Ready To Deploy?
Dec 16, 2022The world currently offers an abundance of data in multiple domains, from which we can learn reinforcement learning (RL) policies without further interaction with the environment. RL agents learning offline from such data is possible but deploying them while learning might be dangerous in domains where safety is critical. Therefore, it is essential to find a way to estimate how a newly-learned agent will perform if deployed in the target environment before actually deploying it and without the risk of overestimating its true performance. To achieve this, we introduce a framework for safe evaluation of offline learning using approximate high-confidence off-policy evaluation (HCOPE) to estimate the performance of offline policies during learning. In our setting, we assume a source of data, which we split into a train-set, to learn an offline policy, and a test-set, to estimate a lower-bound on the offline policy using off-policy evaluation with bootstrapping. A lower-bound estimate tells us how good a newly-learned target policy would perform before it is deployed in the real environment, and therefore allows us to decide when to deploy our learned policy.
Learning on Graphs for Mineral Asset Valuation Under Supply and Demand Uncertainty
Dec 07, 2022Valuing mineral assets is a challenging task that is highly dependent on the supply (geological) uncertainty surrounding resources and reserves, and the uncertainty of demand (commodity prices). In this work, a graph-based reasoning, modeling and solution approach is proposed to jointly address mineral asset valuation and mine plan scheduling and optimization under supply and demand uncertainty in the "mining complex" framework. Three graph-based solutions are proposed: (i) a neural branching policy that learns a block-sampling ore body representation, (ii) a guiding policy that learns to explore a heuristic selection tree, (iii) a hyper-heuristic that manages the value/supply chain optimization and dynamics modeled as a graph structure. Results on two large-scale industrial mining complexes show a reduction of up to three orders of magnitude in primal suboptimality, execution time, and number of iterations, and an increase of up to 40% in the mineral asset value.
VolMap: A Real-time Model for Semantic Segmentation of a LiDAR surrounding view
Jun 12, 2019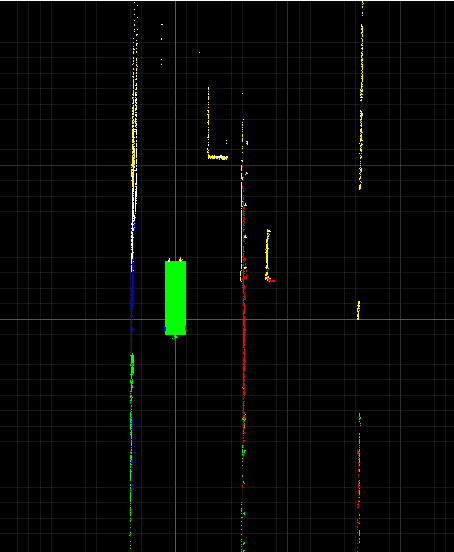


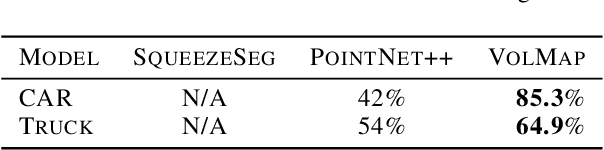
This paper introduces VolMap, a real-time approach for the semantic segmentation of a 3D LiDAR surrounding view system in autonomous vehicles. We designed an optimized deep convolution neural network that can accurately segment the point cloud produced by a 360\degree{} LiDAR setup, where the input consists of a volumetric bird-eye view with LiDAR height layers used as input channels. We further investigated the usage of multi-LiDAR setup and its effect on the performance of the semantic segmentation task. Our evaluations are carried out on a large scale 3D object detection benchmark containing a LiDAR cocoon setup, along with KITTI dataset, where the per-point segmentation labels are derived from 3D bounding boxes. We show that VolMap achieved an excellent balance between high accuracy and real-time running on CPU.