 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLooking for a better fit? An Incremental Learning Multimodal Object Referencing Framework adapting to Individual Drivers
Feb 07, 2024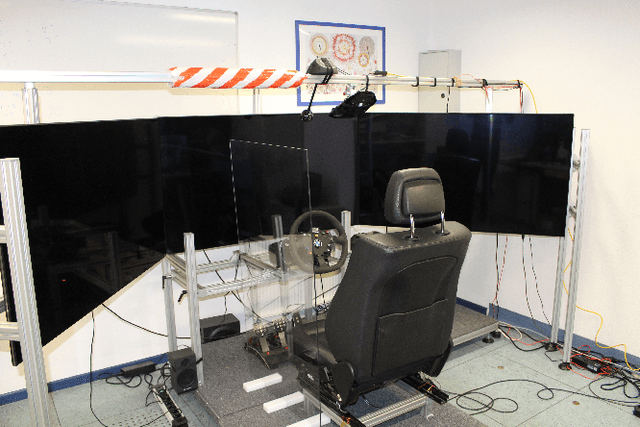
The rapid advancement of the automotive industry towards automated and semi-automated vehicles has rendered traditional methods of vehicle interaction, such as touch-based and voice command systems, inadequate for a widening range of non-driving related tasks, such as referencing objects outside of the vehicle. Consequently, research has shifted toward gestural input (e.g., hand, gaze, and head pose gestures) as a more suitable mode of interaction during driving. However, due to the dynamic nature of driving and individual variation, there are significant differences in drivers' gestural input performance. While, in theory, this inherent variability could be moderated by substantial data-driven machine learning models, prevalent methodologies lean towards constrained, single-instance trained models for object referencing. These models show a limited capacity to continuously adapt to the divergent behaviors of individual drivers and the variety of driving scenarios. To address this, we propose \textit{IcRegress}, a novel regression-based incremental learning approach that adapts to changing behavior and the unique characteristics of drivers engaged in the dual task of driving and referencing objects. We suggest a more personalized and adaptable solution for multimodal gestural interfaces, employing continuous lifelong learning to enhance driver experience, safety, and convenience. Our approach was evaluated using an outside-the-vehicle object referencing use case, highlighting the superiority of the incremental learning models adapted over a single trained model across various driver traits such as handedness, driving experience, and numerous driving conditions. Finally, to facilitate reproducibility, ease deployment, and promote further research, we offer our approach as an open-source framework at \url{https://github.com/amrgomaaelhady/IcRegress}.
It's all about you: Personalized in-Vehicle Gesture Recognition with a Time-of-Flight Camera
Oct 02, 2023



Despite significant advances in gesture recognition technology, recognizing gestures in a driving environment remains challenging due to limited and costly data and its dynamic, ever-changing nature. In this work, we propose a model-adaptation approach to personalize the training of a CNNLSTM model and improve recognition accuracy while reducing data requirements. Our approach contributes to the field of dynamic hand gesture recognition while driving by providing a more efficient and accurate method that can be customized for individual users, ultimately enhancing the safety and convenience of in-vehicle interactions, as well as driver's experience and system trust. We incorporate hardware enhancement using a time-of-flight camera and algorithmic enhancement through data augmentation, personalized adaptation, and incremental learning techniques. We evaluate the performance of our approach in terms of recognition accuracy, achieving up to 90\%, and show the effectiveness of personalized adaptation and incremental learning for a user-centered design.
SynthoGestures: A Novel Framework for Synthetic Dynamic Hand Gesture Generation for Driving Scenarios
Sep 08, 2023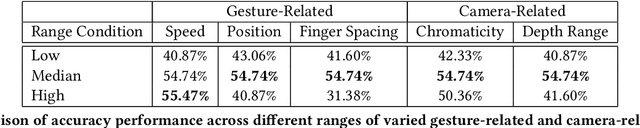
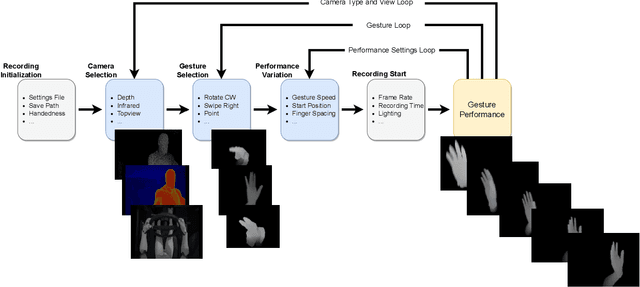
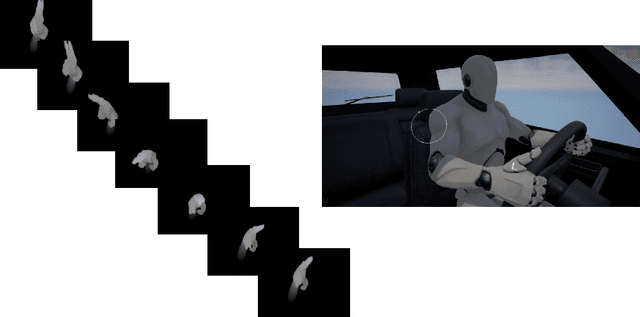
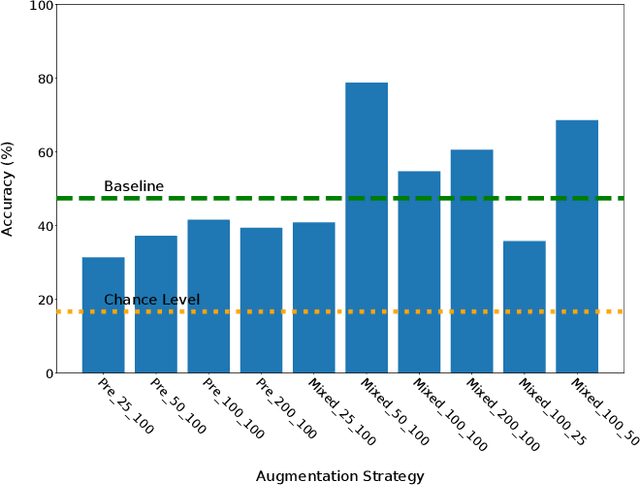
Creating a diverse and comprehensive dataset of hand gestures for dynamic human-machine interfaces in the automotive domain can be challenging and time-consuming. To overcome this challenge, we propose using synthetic gesture datasets generated by virtual 3D models. Our framework utilizes Unreal Engine to synthesize realistic hand gestures, offering customization options and reducing the risk of overfitting. Multiple variants, including gesture speed, performance, and hand shape, are generated to improve generalizability. In addition, we simulate different camera locations and types, such as RGB, infrared, and depth cameras, without incurring additional time and cost to obtain these cameras. Experimental results demonstrate that our proposed framework, SynthoGestures\footnote{\url{https://github.com/amrgomaaelhady/SynthoGestures}}, improves gesture recognition accuracy and can replace or augment real-hand datasets. By saving time and effort in the creation of the data set, our tool accelerates the development of gesture recognition systems for automotive applications.
In-Vehicle Interface Adaptation to Environment-Induced Cognitive Workload
Oct 20, 2022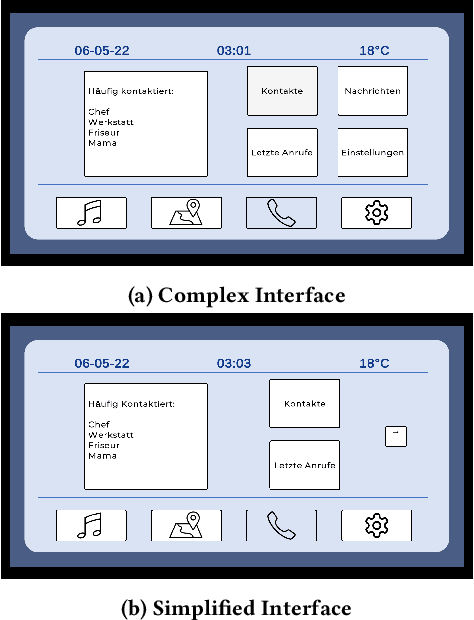
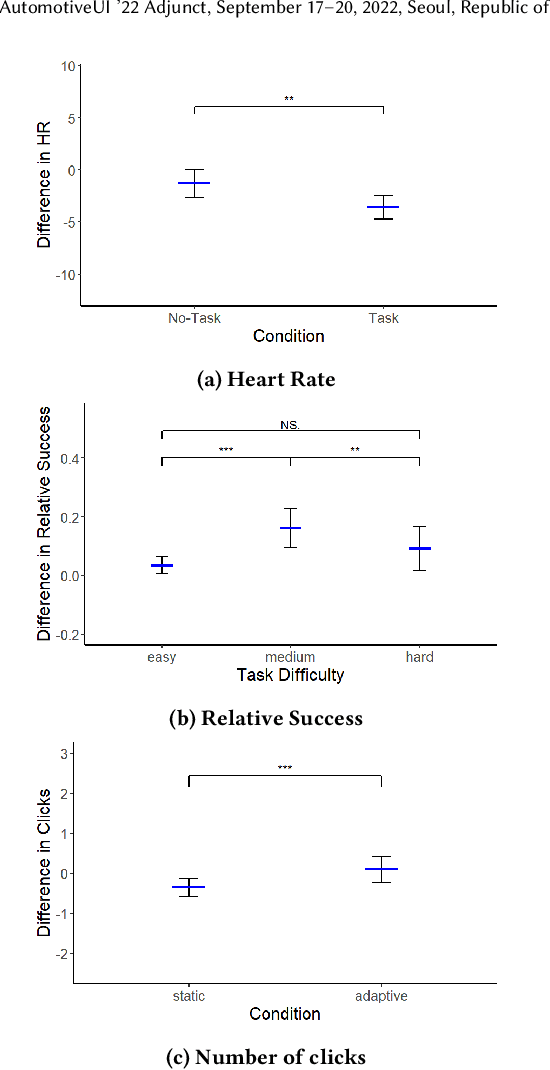
Many car accidents are caused by human distractions, including cognitive distractions. In-vehicle human-machine interfaces (HMIs) have evolved throughout the years, providing more and more functions. Interaction with the HMIs can, however, also lead to further distractions and, as a consequence, accidents. To tackle this problem, we propose using adaptive HMIs that change according to the mental workload of the driver. In this work, we present the current status as well as preliminary results of a user study using naturalistic secondary tasks while driving (i.e., the primary task) that attempt to understand the effects of one such interface.
What's on your mind? A Mental and Perceptual Load Estimation Framework towards Adaptive In-vehicle Interaction while Driving
Aug 10, 2022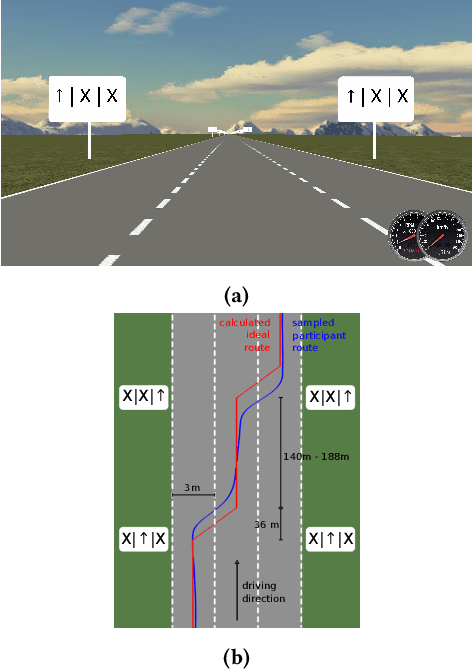


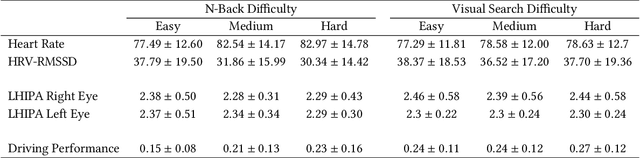
Several researchers have focused on studying driver cognitive behavior and mental load for in-vehicle interaction while driving. Adaptive interfaces that vary with mental and perceptual load levels could help in reducing accidents and enhancing the driver experience. In this paper, we analyze the effects of mental workload and perceptual load on psychophysiological dimensions and provide a machine learning-based framework for mental and perceptual load estimation in a dual task scenario for in-vehicle interaction (https://github.com/amrgomaaelhady/MWL-PL-estimator). We use off-the-shelf non-intrusive sensors that can be easily integrated into the vehicle's system. Our statistical analysis shows that while mental workload influences some psychophysiological dimensions, perceptual load shows little effect. Furthermore, we classify the mental and perceptual load levels through the fusion of these measurements, moving towards a real-time adaptive in-vehicle interface that is personalized to user behavior and driving conditions. We report up to 89% mental workload classification accuracy and provide a real-time minimally-intrusive solution.
ML-PersRef: A Machine Learning-based Personalized Multimodal Fusion Approach for Referencing Outside Objects From a Moving Vehicle
Nov 03, 2021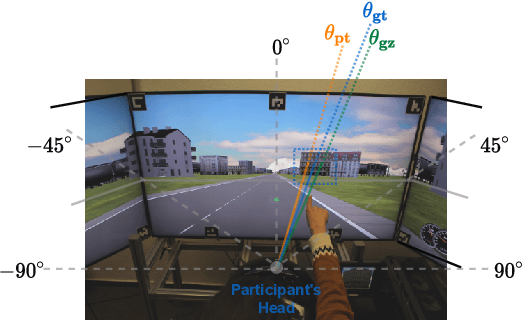

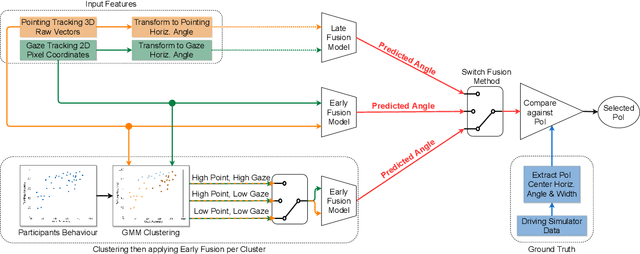
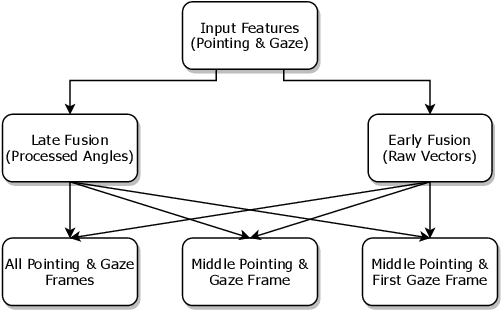
Over the past decades, the addition of hundreds of sensors to modern vehicles has led to an exponential increase in their capabilities. This allows for novel approaches to interaction with the vehicle that go beyond traditional touch-based and voice command approaches, such as emotion recognition, head rotation, eye gaze, and pointing gestures. Although gaze and pointing gestures have been used before for referencing objects inside and outside vehicles, the multimodal interaction and fusion of these gestures have so far not been extensively studied. We propose a novel learning-based multimodal fusion approach for referencing outside-the-vehicle objects while maintaining a long driving route in a simulated environment. The proposed multimodal approaches outperform single-modality approaches in multiple aspects and conditions. Moreover, we also demonstrate possible ways to exploit behavioral differences between users when completing the referencing task to realize an adaptable personalized system for each driver. We propose a personalization technique based on the transfer-of-learning concept for exceedingly small data sizes to enhance prediction and adapt to individualistic referencing behavior. Our code is publicly available at https://github.com/amr-gomaa/ML-PersRef.
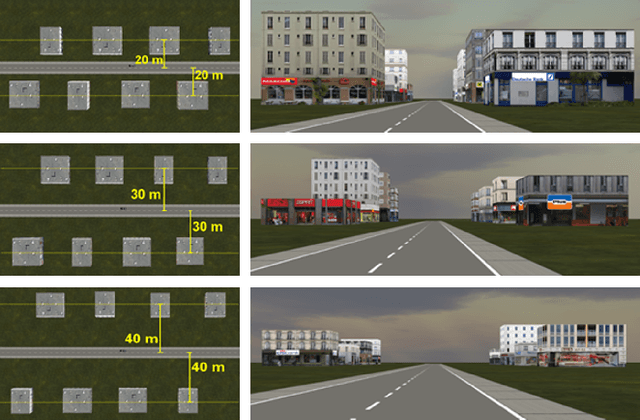
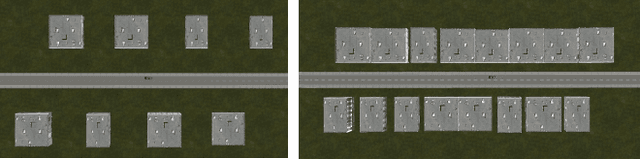
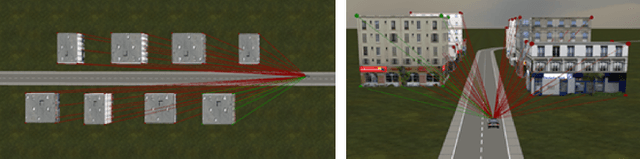
Studying Person-Specific Pointing and Gaze Behavior for Multimodal Referencing of Outside Objects from a Moving Vehicle
Sep 23, 2020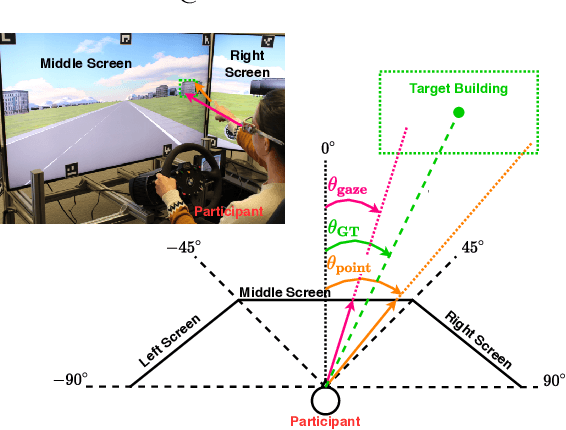
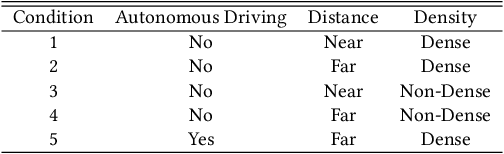

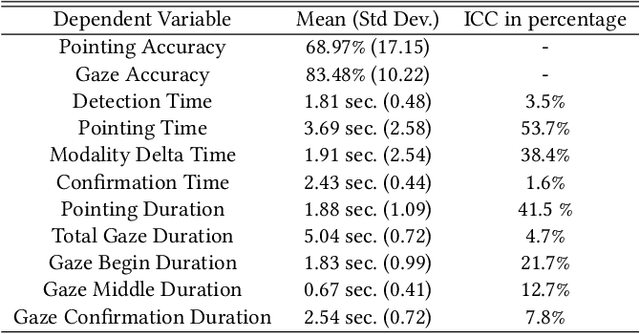
Hand pointing and eye gaze have been extensively investigated in automotive applications for object selection and referencing. Despite significant advances, existing outside-the-vehicle referencing methods consider these modalities separately. Moreover, existing multimodal referencing methods focus on a static situation, whereas the situation in a moving vehicle is highly dynamic and subject to safety-critical constraints. In this paper, we investigate the specific characteristics of each modality and the interaction between them when used in the task of referencing outside objects (e.g. buildings) from the vehicle. We furthermore explore person-specific differences in this interaction by analyzing individuals' performance for pointing and gaze patterns, along with their effect on the driving task. Our statistical analysis shows significant differences in individual behaviour based on object's location (i.e. driver's right side vs. left side), object's surroundings, driving mode (i.e. autonomous vs. normal driving) as well as pointing and gaze duration, laying the foundation for a user-adaptive approach.