 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecurrent Gaussian Processes
Feb 24, 2016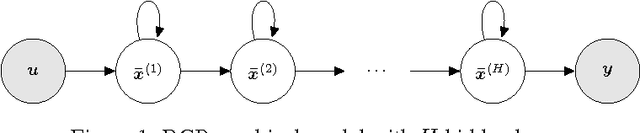


We define Recurrent Gaussian Processes (RGP) models, a general family of Bayesian nonparametric models with recurrent GP priors which are able to learn dynamical patterns from sequential data. Similar to Recurrent Neural Networks (RNNs), RGPs can have different formulations for their internal states, distinct inference methods and be extended with deep structures. In such context, we propose a novel deep RGP model whose autoregressive states are latent, thereby performing representation and dynamical learning simultaneously. To fully exploit the Bayesian nature of the RGP model we develop the Recurrent Variational Bayes (REVARB) framework, which enables efficient inference and strong regularization through coherent propagation of uncertainty across the RGP layers and states. We also introduce a RGP extension where variational parameters are greatly reduced by being reparametrized through RNN-based sequential recognition models. We apply our model to the tasks of nonlinear system identification and human motion modeling. The promising obtained results indicate that our RGP model maintains its highly flexibility while being able to avoid overfitting and being applicable even when larger datasets are not available.