 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReactive Stepping for Humanoid Robots using Reinforcement Learning: Application to Standing Push Recovery on the Exoskeleton Atalante
Mar 02, 2022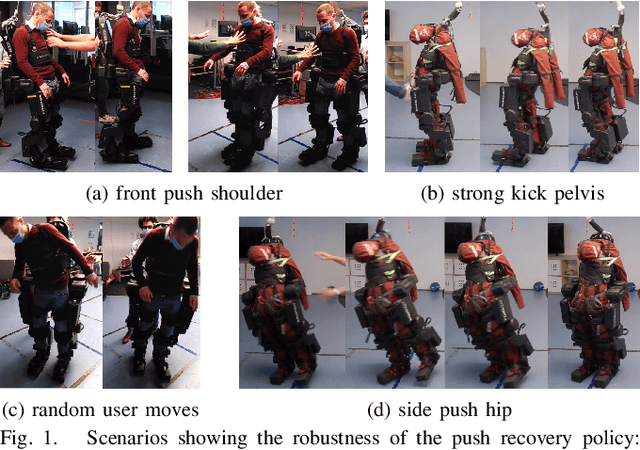
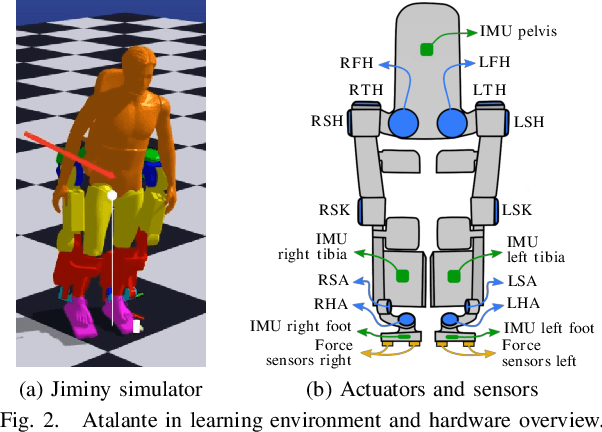


State-of-the-art reinforcement learning is now able to learn versatile locomotion, balancing and push-recovery capabilities for bipedal robots in simulation. Yet, the reality gap has mostly been overlooked and the simulated results hardly transfer to real hardware. Either it is unsuccessful in practice because the physics is over-simplified and hardware limitations are ignored, or regularity is not guaranteed and unexpected hazardous motions can occur. This paper presents a reinforcement learning framework capable of learning robust standing push recovery for bipedal robots with a smooth out-of-the-box transfer to reality, requiring only instantaneous proprioceptive observations. By combining original termination conditions and policy smoothness conditioning, we achieve stable learning, sim-to-real transfer and safety using a policy without memory nor observation history. Reward shaping is then used to give insights into how to keep balance. We demonstrate its performance in reality on the lower-limb medical exoskeleton Atalante.
Online Trajectory Planning Through Combined Trajectory Optimization and Function Approximation: Application to the Exoskeleton Atalante
Oct 02, 2019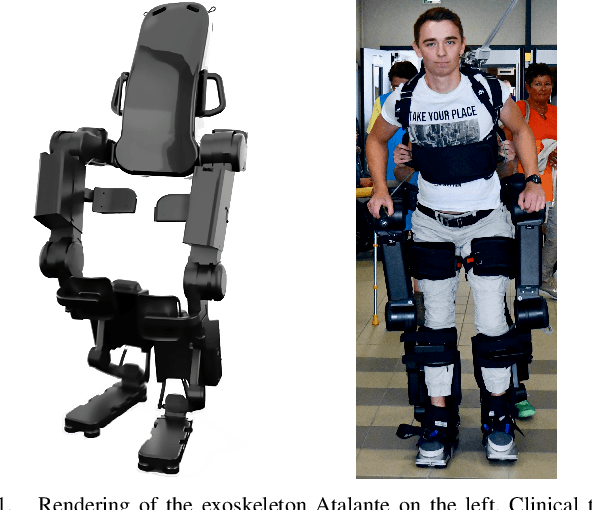
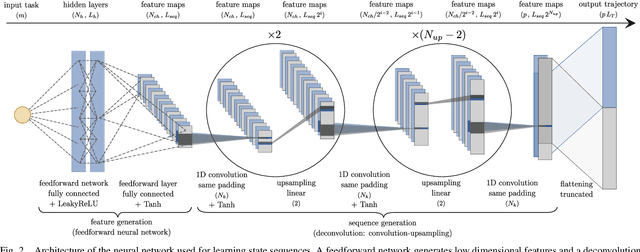
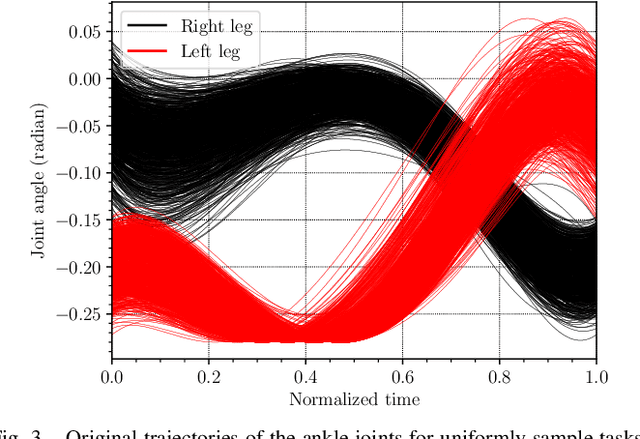

Autonomous robots require online trajectory planning capability to operate in the real world. Efficient offline trajectory planning methods already exist, but are computationally demanding, preventing their use online. In this paper, we present a novel algorithm called Guided Trajectory Learning that learns a function approximation of solutions computed through trajectory optimization while ensuring accurate and reliable predictions. This function approximation is then used online to generate trajectories. This algorithm is designed to be easy to implement, and practical since it does not require massive computing power. It is readily applicable to any robotics systems and effortless to set up on real hardware since robust control strategies are usually already available. We demonstrate the performance of our algorithm on flat-foot walking with the self-balanced exoskeleton Atalante.