 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStair Climbing using the Angular Momentum Linear Inverted Pendulum Model and Model Predictive Control
Jul 11, 2023A new control paradigm using angular momentum and foot placement as state variables in the linear inverted pendulum model has expanded the realm of possibilities for the control of bipedal robots. This new paradigm, known as the ALIP model, has shown effectiveness in cases where a robot's center of mass height can be assumed to be constant or near constant as well as in cases where there are no non-kinematic restrictions on foot placement. Walking up and down stairs violates both of these assumptions, where center of mass height varies significantly within a step and the geometry of the stairs restrict the effectiveness of foot placement. In this paper, we explore a variation of the ALIP model that allows the length of the virtual pendulum formed by the robot's stance foot and center of mass to follow smooth trajectories during a step. We couple this model with a control strategy constructed from a novel combination of virtual constraint-based control and a model predictive control algorithm to stabilize a stair climbing gait that does not soley rely on foot placement. Simulations on a 20-degree of freedom model of the Cassie biped in the SimMechanics simulation environment show that the controller is able to achieve periodic gait.
Exploring Kinodynamic Fabrics for Reactive Whole-Body Control of Underactuated Humanoid Robots
Mar 09, 2023For bipedal humanoid robots to successfully operate in the real world, they must be competent at simultaneously executing multiple motion tasks while reacting to unforeseen external disturbances in real-time. We propose Kinodynamic Fabrics as an approach for the specification, solution and simultaneous execution of multiple motion tasks in real-time while being reactive to dynamism in the environment. Kinodynamic Fabrics allows for the specification of prioritized motion tasks as forced spectral semi-sprays and solves for desired robot joint accelerations at real-time frequencies. We evaluate the capabilities of Kinodynamic fabrics on diverse physically challenging whole-body control tasks with a bipedal humanoid robot both in simulation and in the real-world. Kinodynamic Fabrics outperforms the state-of-the-art Quadratic Program based whole-body controller on a variety of whole-body control tasks on run-time and reactivity metrics in our experiments. Our open-source implementation of Kinodynamic Fabrics as well as robot demonstration videos can be found at this url: https://adubredu.github.io/kinofabs.
Terrain-Aware Foot Placement for Bipedal Locomotion Combining Model Predictive Control, Virtual Constraints, and the ALIP
Sep 30, 2021
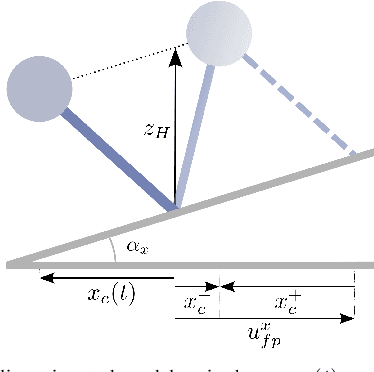
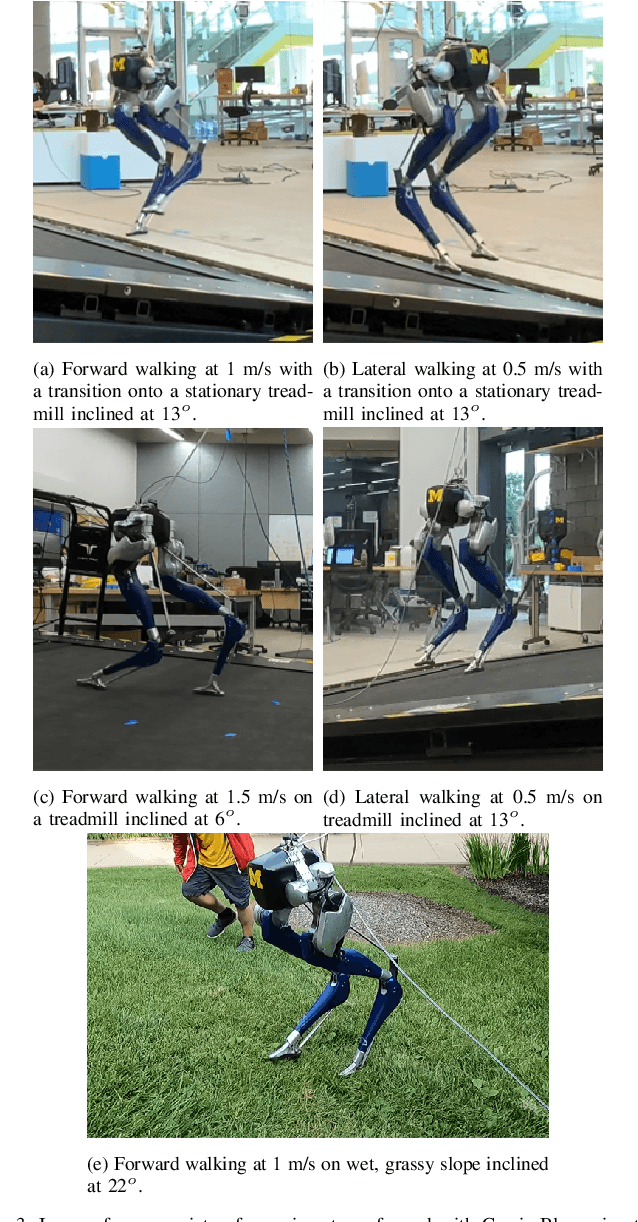
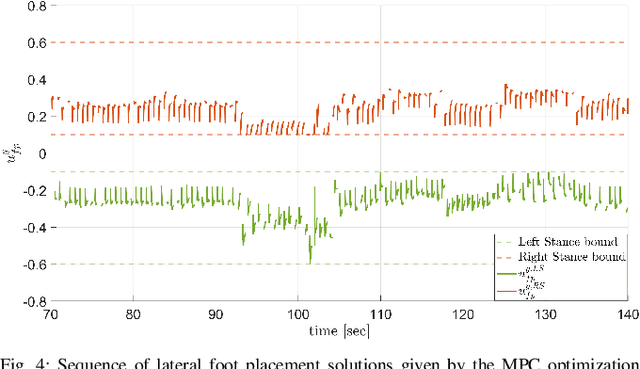
This paper draws upon three themes in the bipedal control literature to achieve highly agile, terrain-aware locomotion. By terrain aware, we mean the robot can use information on terrain slope and friction cone as supplied by state-of-the-art mapping and trajectory planning algorithms. The process starts with abstracting from the full dynamics of a Cassie 3D bipedal robot, an exact low-dimensional representation of its centroidal dynamics, parameterized by angular momentum. Under a piecewise planar terrain assumption, and the elimination of terms for the angular momentum about the robot's center of mass, the centroidal dynamics become linear and has dimension four. Four-step-horizon model predictive control (MPC) of the centroidal dynamics provides step-to-step foot placement commands. Importantly, we also include the intra-step dynamics at 10 ms intervals so that realistic terrain-aware constraints on robot's evolution can be imposed in the MPC formulation. The output of the MPC is directly implemented on Cassie through the method of virtual constraints. In experiments, we validate the performance of our control strategy for the robot on inclined and stationary terrain, both indoors on a treadmill and outdoors on a hill.