 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Control Policies to Provably Satisfy Hard Affine Constraints for Black-Box Hybrid Dynamical Systems
Apr 24, 2026Ensuring safety for black-box hybrid dynamical systems presents significant challenges due to their instantaneous state jumps and unknown explicit nonlinear dynamics. Existing solutions for strict safety constraint satisfaction, like control barrier functions (CBFs) and reachability analysis, rely on direct knowledge of the dynamics. Similarly, safe reinforcement learning (RL) approaches often rely on known system dynamics or merely discourage safety violations through reward shaping. In this work, we want to learn RL policies which provably satisfy affine state constraints in closed loop for black-box hybrid dynamical systems with affine reset maps. Our key insight is forcing the RL policy to be affine and repulsive near the constraint boundaries for the unknown nonlinear dynamics of the system, providing guarantees that the trajectories will not violate the constraint. We further account for constraint violation due to instantaneous state jumps that occur due to impacts or reset maps in the hybrid system by introducing a second repulsive affine region before the reset that prevents post-reset states from violating the constraint. We derive sufficient conditions under which these policies satisfy safety constraints in closed loop. We also compare our approach with state-of-the-art reward shaping and learned-CBF methods on hybrid dynamical systems like the constrained pendulum and paddle juggler environments. In both scenarios, we show that our methodology learns higher quality policies while always satisfying the safety constraints.
Demonstrating a Robust Walking Algorithm for Underactuated Bipedal Robots in Non-flat, Non-stationary Environments
Mar 04, 2024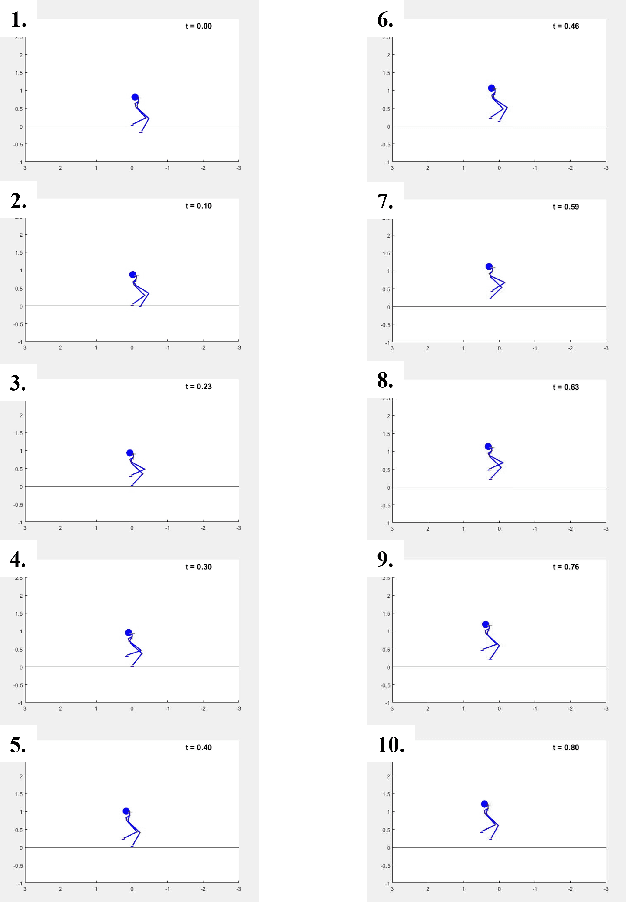
This work explores an innovative algorithm designed to enhance the mobility of underactuated bipedal robots across challenging terrains, especially when navigating through spaces with constrained opportunities for foot support, like steps or stairs. By combining ankle torque with a refined angular momentum-based linear inverted pendulum model (ALIP), our method allows variability in the robot's center of mass height. We employ a dual-strategy controller that merges virtual constraints for precise motion regulation across essential degrees of freedom with an ALIP-centric model predictive control (MPC) framework, aimed at enforcing gait stability. The effectiveness of our feedback design is demonstrated through its application on the Cassie bipedal robot, which features 20 degrees of freedom. Key to our implementation is the development of tailored nominal trajectories and an optimized MPC that reduces the execution time to under 500 microseconds--and, hence, is compatible with Cassie's controller update frequency. This paper not only showcases the successful hardware deployment but also demonstrates a new capability, a bipedal robot using a moving walkway.
Stair Climbing using the Angular Momentum Linear Inverted Pendulum Model and Model Predictive Control
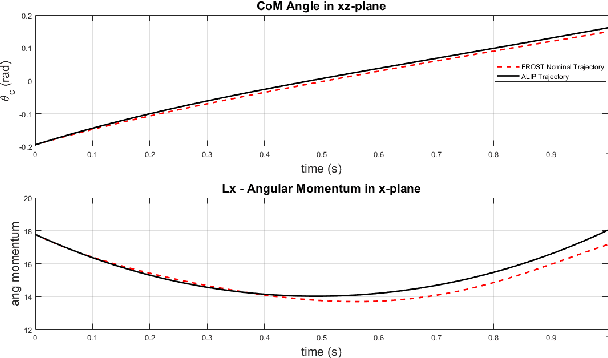
Jul 11, 2023A new control paradigm using angular momentum and foot placement as state variables in the linear inverted pendulum model has expanded the realm of possibilities for the control of bipedal robots. This new paradigm, known as the ALIP model, has shown effectiveness in cases where a robot's center of mass height can be assumed to be constant or near constant as well as in cases where there are no non-kinematic restrictions on foot placement. Walking up and down stairs violates both of these assumptions, where center of mass height varies significantly within a step and the geometry of the stairs restrict the effectiveness of foot placement. In this paper, we explore a variation of the ALIP model that allows the length of the virtual pendulum formed by the robot's stance foot and center of mass to follow smooth trajectories during a step. We couple this model with a control strategy constructed from a novel combination of virtual constraint-based control and a model predictive control algorithm to stabilize a stair climbing gait that does not soley rely on foot placement. Simulations on a 20-degree of freedom model of the Cassie biped in the SimMechanics simulation environment show that the controller is able to achieve periodic gait.