 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscovering Object-Centric Generalized Value Functions From Pixels
Apr 27, 2023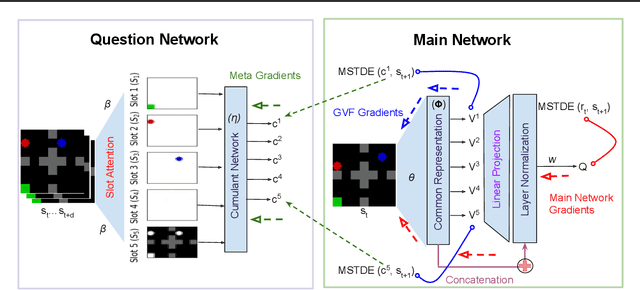
Deep Reinforcement Learning has shown significant progress in extracting useful representations from high-dimensional inputs albeit using hand-crafted auxiliary tasks and pseudo rewards. Automatically learning such representations in an object-centric manner geared towards control and fast adaptation remains an open research problem. In this paper, we introduce a method that tries to discover meaningful features from objects, translating them to temporally coherent "question" functions and leveraging the subsequent learned general value functions for control. We compare our approach with state-of-the-art techniques alongside other ablations and show competitive performance in both stationary and non-stationary settings. Finally, we also investigate the discovered general value functions and through qualitative analysis show that the learned representations are not only interpretable but also, centered around objects that are invariant to changes across tasks facilitating fast adaptation.
Trajectory Control for Differential Drive Mobile Manipulators
Mar 31, 2023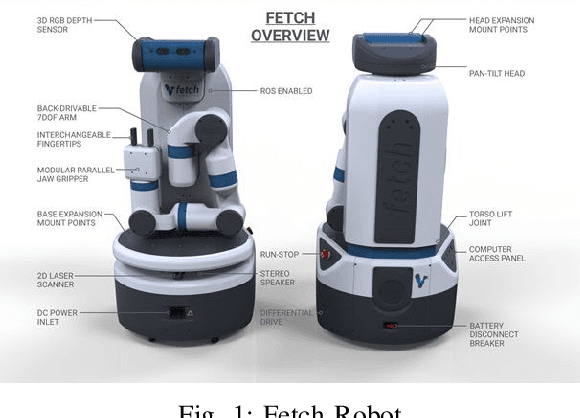
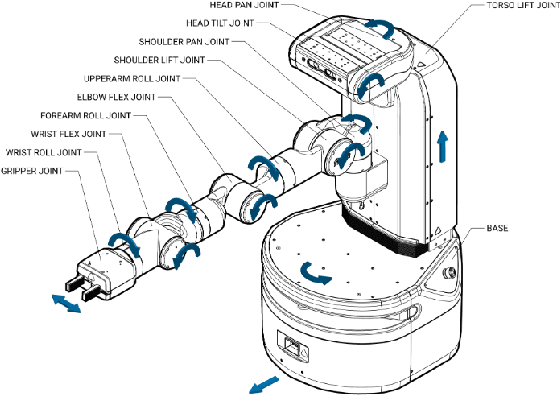
Mobile manipulator systems are comprised of a mobile platform with one or more manipulators and are of great interest in a number of applications such as indoor warehouses, mining, construction, forestry etc. We present an approach for computing actuator commands for such systems so that they can follow desired end-effector and platform trajectories without the violation of the nonholonomic constraints of the system in an indoor warehouse environment. We work with the Fetch robot which consists of a 7-DOF manipulator with a differential drive mobile base to validate our method. The major contributions of our project are, writing the dynamics of the system, Trajectory planning for the manipulator and the mobile base, state machine for the pick and place task and the inverse kinematics of the manipulator. Our results indicate that we are able to successfully implement trajectory control on the mobile base and the manipulator of the Fetch robot.