 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInSeGAN: A Generative Approach to Segmenting Identical Instances in Depth Images
Aug 31, 2021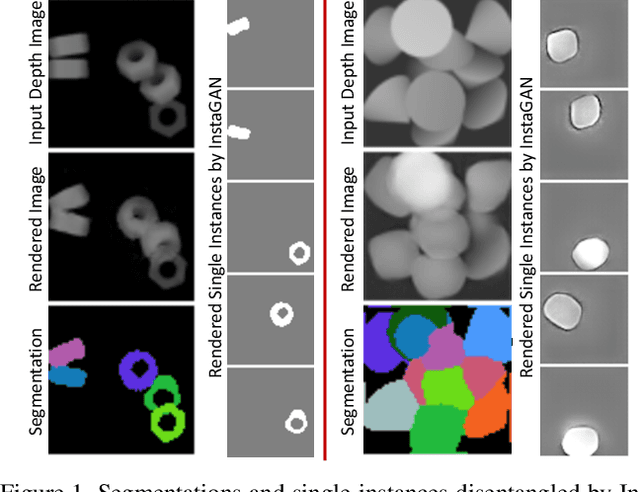
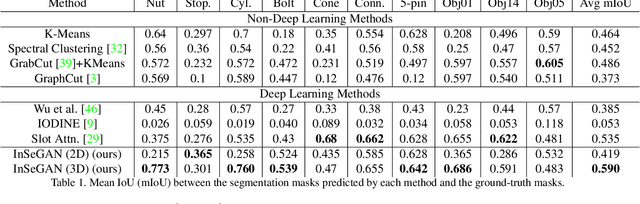
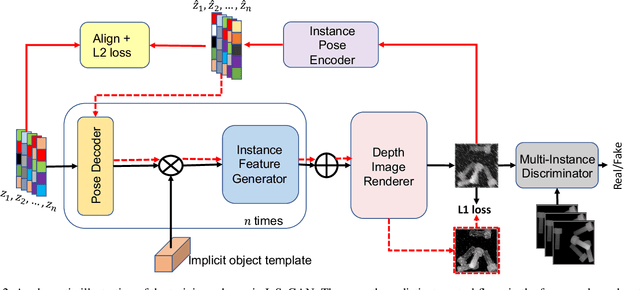

In this paper, we present InSeGAN, an unsupervised 3D generative adversarial network (GAN) for segmenting (nearly) identical instances of rigid objects in depth images. Using an analysis-by-synthesis approach, we design a novel GAN architecture to synthesize a multiple-instance depth image with independent control over each instance. InSeGAN takes in a set of code vectors (e.g., random noise vectors), each encoding the 3D pose of an object that is represented by a learned implicit object template. The generator has two distinct modules. The first module, the instance feature generator, uses each encoded pose to transform the implicit template into a feature map representation of each object instance. The second module, the depth image renderer, aggregates all of the single-instance feature maps output by the first module and generates a multiple-instance depth image. A discriminator distinguishes the generated multiple-instance depth images from the distribution of true depth images. To use our model for instance segmentation, we propose an instance pose encoder that learns to take in a generated depth image and reproduce the pose code vectors for all of the object instances. To evaluate our approach, we introduce a new synthetic dataset, "Insta-10", consisting of 100,000 depth images, each with 5 instances of an object from one of 10 classes. Our experiments on Insta-10, as well as on real-world noisy depth images, show that InSeGAN achieves state-of-the-art performance, often outperforming prior methods by large margins.