 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimation of embedding vectors in high dimensions
Dec 12, 2023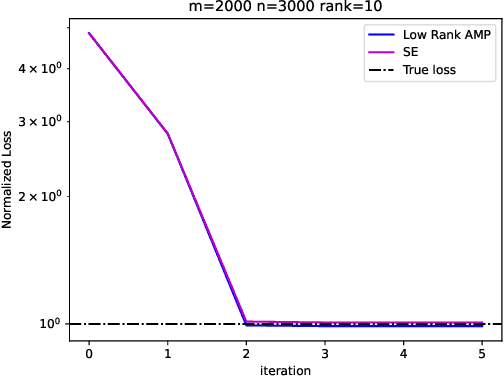
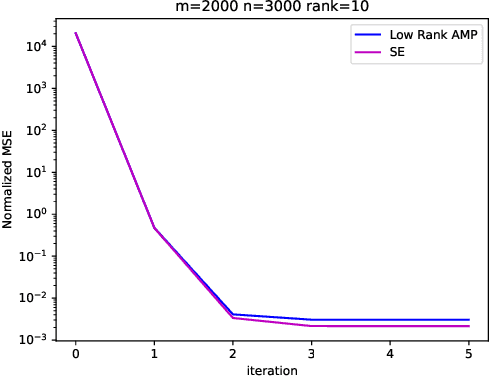
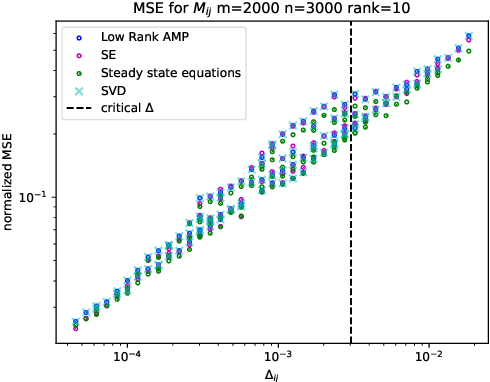
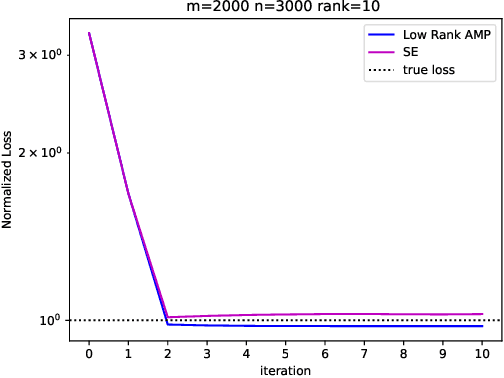
Embeddings are a basic initial feature extraction step in many machine learning models, particularly in natural language processing. An embedding attempts to map data tokens to a low-dimensional space where similar tokens are mapped to vectors that are close to one another by some metric in the embedding space. A basic question is how well can such embedding be learned? To study this problem, we consider a simple probability model for discrete data where there is some "true" but unknown embedding where the correlation of random variables is related to the similarity of the embeddings. Under this model, it is shown that the embeddings can be learned by a variant of low-rank approximate message passing (AMP) method. The AMP approach enables precise predictions of the accuracy of the estimation in certain high-dimensional limits. In particular, the methodology provides insight on the relations of key parameters such as the number of samples per value, the frequency of the terms, and the strength of the embedding correlation on the probability distribution. Our theoretical findings are validated by simulations on both synthetic data and real text data.
ViT-MDHGR: Cross-day Reliability and Agility in Dynamic Hand Gesture Prediction via HD-sEMG Signal Decoding
Sep 22, 2023



Surface electromyography (sEMG) and high-density sEMG (HD-sEMG) biosignals have been extensively investigated for myoelectric control of prosthetic devices, neurorobotics, and more recently human-computer interfaces because of their capability for hand gesture recognition/prediction in a wearable and non-invasive manner. High intraday (same-day) performance has been reported. However, the interday performance (separating training and testing days) is substantially degraded due to the poor generalizability of conventional approaches over time, hindering the application of such techniques in real-life practices. There are limited recent studies on the feasibility of multi-day hand gesture recognition. The existing studies face a major challenge: the need for long sEMG epochs makes the corresponding neural interfaces impractical due to the induced delay in myoelectric control. This paper proposes a compact ViT-based network for multi-day dynamic hand gesture prediction. We tackle the main challenge as the proposed model only relies on very short HD-sEMG signal windows (i.e., 50 ms, accounting for only one-sixth of the convention for real-time myoelectric implementation), boosting agility and responsiveness. Our proposed model can predict 11 dynamic gestures for 20 subjects with an average accuracy of over 71% on the testing day, 3-25 days after training. Moreover, when calibrated on just a small portion of data from the testing day, the proposed model can achieve over 92% accuracy by retraining less than 10% of the parameters for computational efficiency.