 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-adapting confidence estimation for stereo
Aug 14, 2020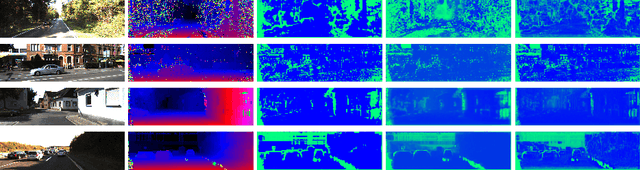

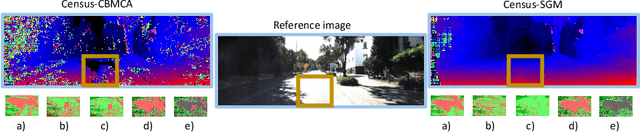

Estimating the confidence of disparity maps inferred by a stereo algorithm has become a very relevant task in the years, due to the increasing number of applications leveraging such cue. Although self-supervised learning has recently spread across many computer vision tasks, it has been barely considered in the field of confidence estimation. In this paper, we propose a flexible and lightweight solution enabling self-adapting confidence estimation agnostic to the stereo algorithm or network. Our approach relies on the minimum information available in any stereo setup (i.e., the input stereo pair and the output disparity map) to learn an effective confidence measure. This strategy allows us not only a seamless integration with any stereo system, including consumer and industrial devices equipped with undisclosed stereo perception methods, but also, due to its self-adapting capability, for its out-of-the-box deployment in the field. Exhaustive experimental results with different standard datasets support our claims, showing how our solution is the first-ever enabling online learning of accurate confidence estimation for any stereo system and without any requirement for the end-user.
Real-time single image depth perception in the wild with handheld devices
Jun 10, 2020
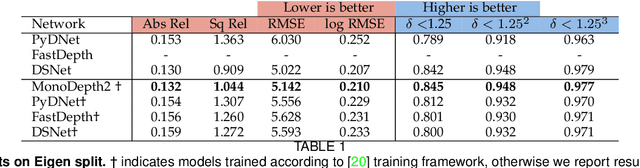

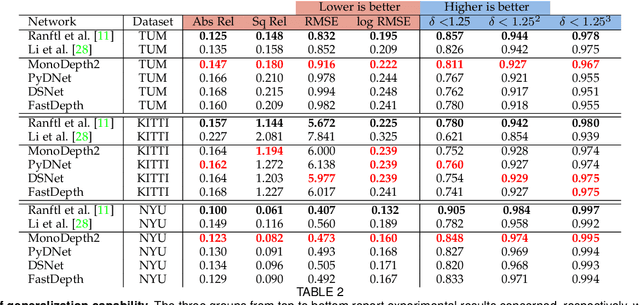
Depth perception is paramount to tackle real-world problems, ranging from autonomous driving to consumer applications. For the latter, depth estimation from a single image represents the most versatile solution, since a standard camera is available on almost any handheld device. Nonetheless, two main issues limit its practical deployment: i) the low reliability when deployed in-the-wild and ii) the demanding resource requirements to achieve real-time performance, often not compatible with such devices. Therefore, in this paper, we deeply investigate these issues showing how they are both addressable adopting appropriate network design and training strategies -- also outlining how to map the resulting networks on handheld devices to achieve real-time performance. Our thorough evaluation highlights the ability of such fast networks to generalize well to new environments, a crucial feature required to tackle the extremely varied contexts faced in real applications. Indeed, to further support this evidence, we report experimental results concerning real-time depth-aware augmented reality and image blurring with smartphones in-the-wild.