 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocial Robots for People with Dementia: A Literature Review on Deception from Design to Perception
Jul 01, 2025As social robots increasingly enter dementia care, concerns about deception, intentional or not, are gaining attention. Yet, how robotic design cues might elicit misleading perceptions in people with dementia, and how these perceptions arise, remains insufficiently understood. In this scoping review, we examined 26 empirical studies on interactions between people with dementia and physical social robots. We identify four key design cue categories that may influence deceptive impressions: cues resembling physiological signs (e.g., simulated breathing), social intentions (e.g., playful movement), familiar beings (e.g., animal-like form and sound), and, to a lesser extent, cues that reveal artificiality. Thematic analysis of user responses reveals that people with dementia often attribute biological, social, and mental capacities to robots, dynamically shifting between awareness and illusion. These findings underscore the fluctuating nature of ontological perception in dementia contexts. Existing definitions of robotic deception often rest on philosophical or behaviorist premises, but rarely engage with the cognitive mechanisms involved. We propose an empirically grounded definition: robotic deception occurs when Type 1 (automatic, heuristic) processing dominates over Type 2 (deliberative, analytic) reasoning, leading to misinterpretation of a robot's artificial nature. This dual-process perspective highlights the ethical complexity of social robots in dementia care and calls for design approaches that are not only engaging, but also epistemically respectful.
Robot's Gendering Trouble: A Scoping Review of Gendering Humanoid Robots and its Effects on HRI
Jul 03, 2022

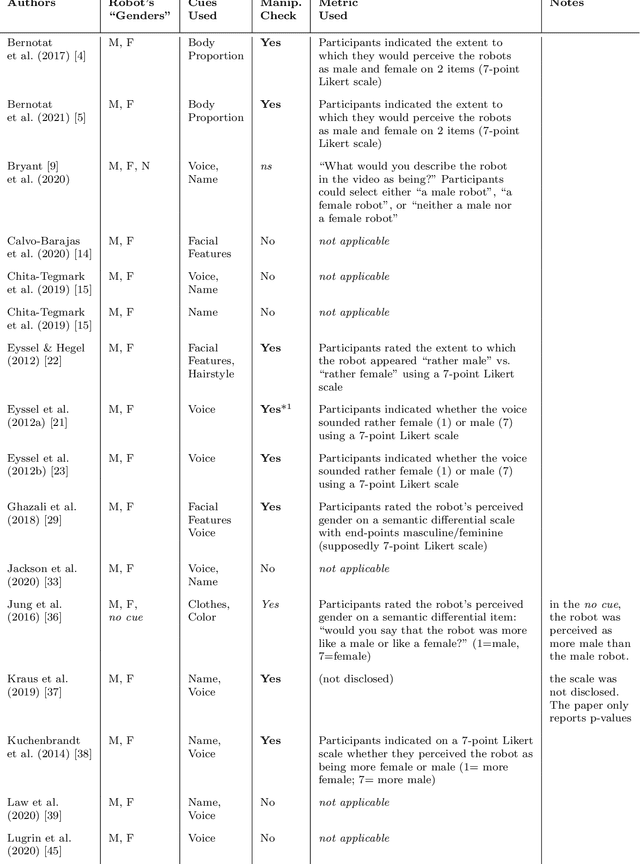

The discussion around the problematic practice of gendering humanoid robots has risen to the foreground in the last few years. To lay the basis for a thorough understanding of how robot's "gender" has been understood within the Human-Robot Interaction (HRI) community - i.e., how it has been manipulated, in which contexts, and which effects it has yield on people's perceptions and interactions with robots - we performed a scoping review of the literature. We identified 553 papers relevant for our review retrieved from 5 different databases. The final sample of reviewed papers included 35 papers written between 2005 and 2021, which involved a total of 3902 participants. In this article, we thoroughly summarize these papers by reporting information about their objectives and assumptions on gender (i.e., definitions and reasons to manipulate gender), their manipulation of robot's "gender" (i.e., gender cues and manipulation checks), their experimental designs (e.g., demographics of participants, employed robots), and their results (i.e., main and interaction effects). The review reveals that robot's "gender" does not affect crucial constructs for the HRI, such as likability and acceptance, but rather bears its strongest effect on stereotyping. We leverage our different epistemological backgrounds in Social Robotics and Gender Studies to provide a comprehensive interdisciplinary perspective on the results of the review and suggest ways to move forward in the field of HRI.
Does the Goal Matter? Emotion Recognition Tasks Can Change the Social Value of Facial Mimicry towards Artificial Agents
May 05, 2021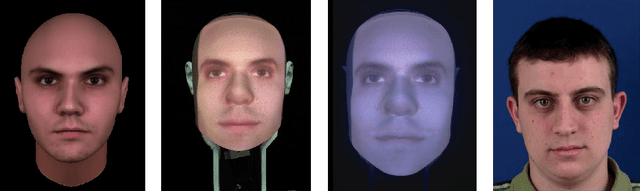
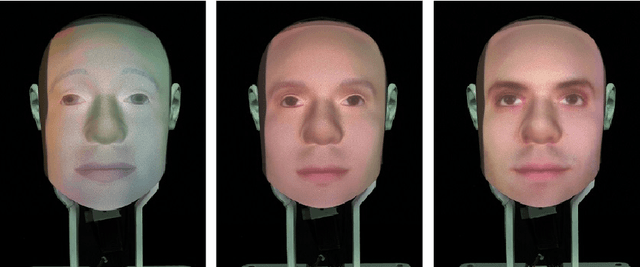
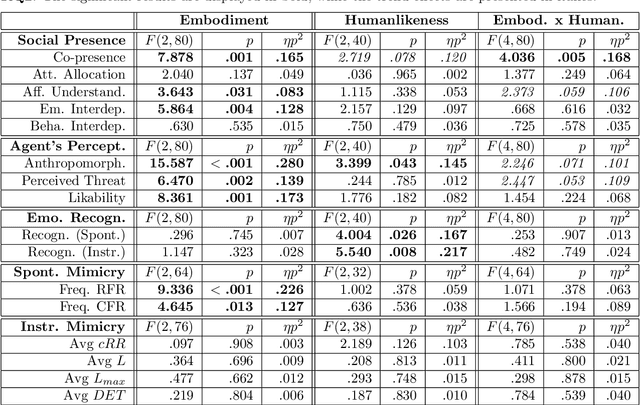
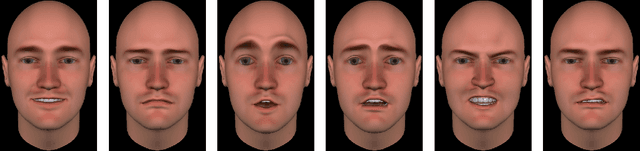
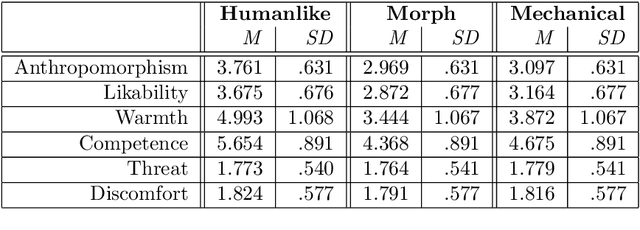
In this paper, we present a study aimed at understanding whether the embodiment and humanlikeness of an artificial agent can affect people's spontaneous and instructed mimicry of its facial expressions. The study followed a mixed experimental design and revolved around an emotion recognition task. Participants were randomly assigned to one level of humanlikeness (between-subject variable: humanlike, characterlike, or morph facial texture of the artificial agents) and observed the facial expressions displayed by a human (control) and three artificial agents differing in embodiment (within-subject variable: video-recorded robot, physical robot, and virtual agent). To study both spontaneous and instructed facial mimicry, we divided the experimental sessions into two phases. In the first phase, we asked participants to observe and recognize the emotions displayed by the agents. In the second phase, we asked them to look at the agents' facial expressions, replicate their dynamics as closely as possible, and then identify the observed emotions. In both cases, we assessed participants' facial expressions with an automated Action Unit (AU) intensity detector. Contrary to our hypotheses, our results disclose that the agent that was perceived as the least uncanny, and most anthropomorphic, likable, and co-present, was the one spontaneously mimicked the least. Moreover, they show that instructed facial mimicry negatively predicts spontaneous facial mimicry. Further exploratory analyses revealed that spontaneous facial mimicry appeared when participants were less certain of the emotion they recognized. Hence, we postulate that an emotion recognition goal can flip the social value of facial mimicry as it transforms a likable artificial agent into a distractor.
I Can See it in Your Eyes: Gaze towards a Robot as an Implicit Cue of Uncanniness and Task Performance in Long-term Interactions
Jan 13, 2021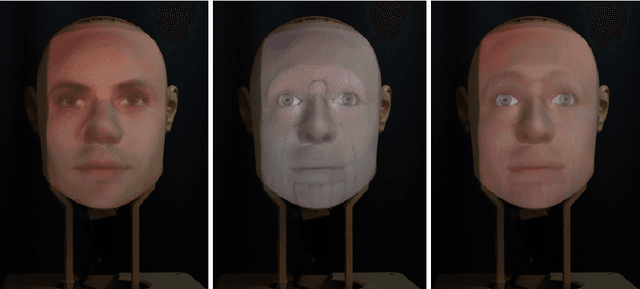
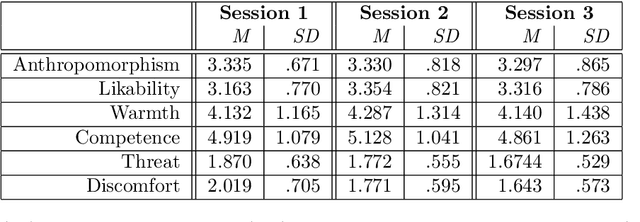
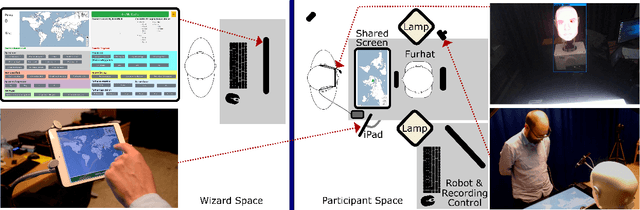
Over the past years, extensive research has been dedicated to developing robust platforms and data-driven dialogue models to support long-term human-robot interactions. However, little is known about how people's perception of robots and engagement with them develop over time and how these can be accurately assessed through implicit and continuous measurement techniques. In this paper, we investigate this by involving participants in three interaction sessions with multiple days of zero exposure in between. Each session consists of a joint task with a robot as well as two short social chats with it before and after the task. We measure participants' gaze patterns with a wearable eye-tracker and gauge their perception of the robot and engagement with it and the joint task using questionnaires. Results disclose that aversion of gaze in a social chat is an indicator of a robot's uncanniness and that the more people gaze at the robot in a joint task, the worse they perform. In contrast with most HRI literature, our results show that gaze towards an object of shared attention, rather than gaze towards a robotic partner, is the most meaningful predictor of engagement in a joint task. Furthermore, the analyses of long-term gaze patterns disclose that people's mutual gaze in a social chat develops congruently with their perceptions of the robot over time. These are key findings for the HRI community as they entail that gaze behavior can be used as an implicit measure of people's perception of robots in a social chat and of their engagement and task performance in a joint task.