 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeliberative and Conceptual Inference in Service Robots
Dec 13, 2020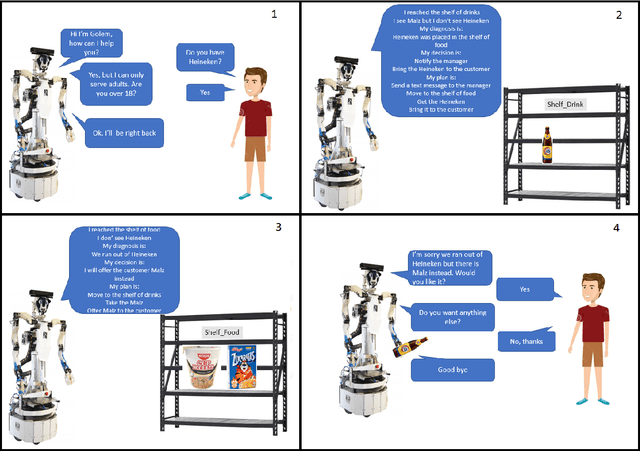
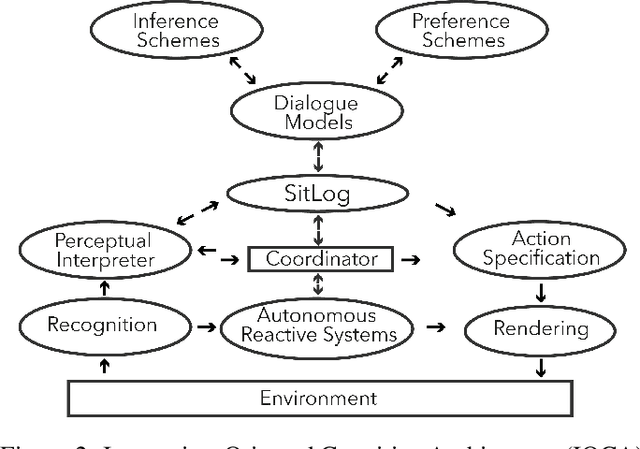
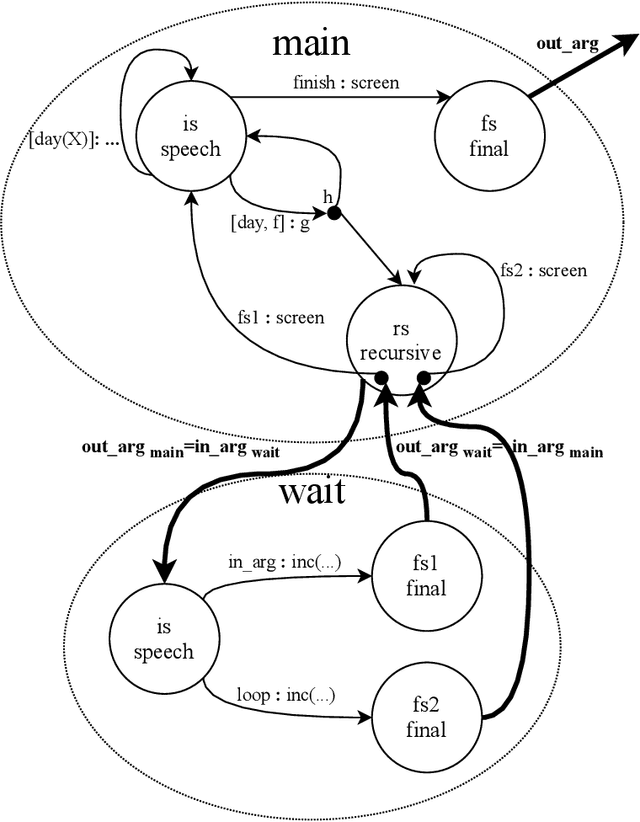
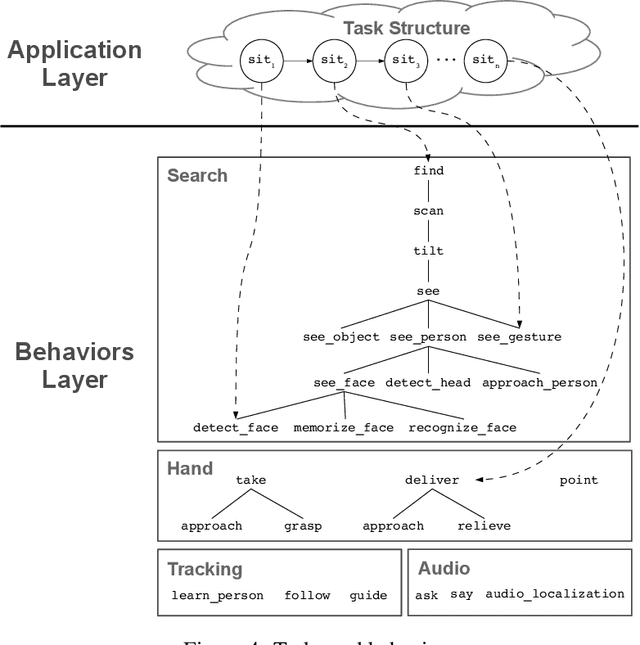
Service robots need to reason to support people in daily life situations. Reasoning is an expensive resource that should be used on demand whenever the expectations of the robot do not match the situation of the world and the execution of the task is broken down; in such scenarios the robot must perform the common sense daily life inference cycle consisting on diagnosing what happened, deciding what to do about it, and inducing and executing a plan, recurring in such behavior until the service task can be resumed. Here we examine two strategies to implement this cycle: (1) a pipe-line strategy involving abduction, decision-making and planning, which we call deliberative inference and (2) the use of the knowledge and preferences stored in the robot's knowledge-base, which we call conceptual inference. The former involves an explicit definition of a problem space that is explored through heuristic search, and the latter is based on conceptual knowledge including the human user preferences, and its representation requires a non-monotonic knowledge-based system. We compare the strengths and limitations of both approaches. We also describe a service robot conceptual model and architecture capable of supporting the daily life inference cycle during the execution of a robotics service task. The model is centered in the declarative specification and interpretation of robot's communication and task structure. We also show the implementation of this framework in the fully autonomous robot Golem-III. The framework is illustrated with two demonstration scenarios.
An Entropic Associative Memory
Sep 28, 2020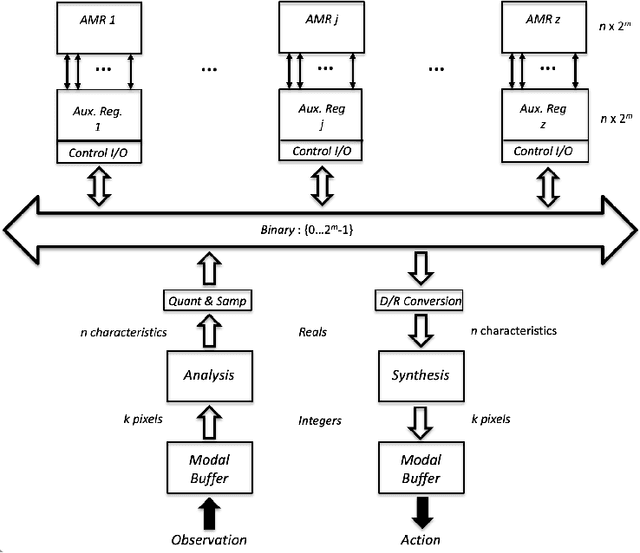



Natural memories are associative, declarative and distributed. Symbolic computing memories resemble natural memories in their declarative character, and information can be stored and recovered explicitly; however, they lack the associative and distributed properties of natural memories. Sub-symbolic memories developed within the connectionist or artificial neural networks paradigm are associative and distributed, but are unable to express symbolic structure and information cannot be stored and retrieved explicitly; hence, they lack the declarative property. To address this dilemma, we use Relational-Indeterminate Computing to model associative memory registers that hold distributed representations of individual objects. This mode of computing has an intrinsic computing entropy which measures the indeterminacy of representations. This parameter determines the operational characteristics of the memory. Associative registers are embedded in an architecture that maps concrete images expressed in modality-specific buffers into abstract representations, and vice versa, and the memory system as a whole fulfills the three properties of natural memories. The system has been used to model a visual memory holding the representations of hand-written digits, and recognition and recall experiments show that there is a range of entropy values, not too low and not too high, in which associative memory registers have a satisfactory performance. The similarity between the cue and the object recovered in memory retrieve operations depends on the entropy of the memory register holding the representation of the corresponding object. The experiments were implemented in a simulation using a standard computer, but a parallel architecture may be built where the memory operations would take a very reduced number of computing steps.