 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffusion-based Inverse Model of a Distributed Tactile Sensor for Object Pose Estimation
Jan 19, 2026Tactile sensing provides a promising sensing modality for object pose estimation in manipulation settings where visual information is limited due to occlusion or environmental effects. However, efficiently leveraging tactile data for estimation remains a challenge due to partial observability, with single observations corresponding to multiple possible contact configurations. This limits conventional estimation approaches largely tailored to vision. We propose to address these challenges by learning an inverse tactile sensor model using denoising diffusion. The model is conditioned on tactile observations from a distributed tactile sensor and trained in simulation using a geometric sensor model based on signed distance fields. Contact constraints are enforced during inference through single-step projection using distance and gradient information from the signed distance field. For online pose estimation, we integrate the inverse model with a particle filter through a proposal scheme that combines generated hypotheses with particles from the prior belief. Our approach is validated in simulated and real-world planar pose estimation settings, without access to visual data or tight initial pose priors. We further evaluate robustness to unmodeled contact and sensor dynamics for pose tracking in a box-pushing scenario. Compared to local sampling baselines, the inverse sensor model improves sampling efficiency and estimation accuracy while preserving multimodal beliefs across objects with varying tactile discriminability.
Estimating Scene Flow in Robot Surroundings with Distributed Miniaturized Time-of-Flight Sensors
Apr 03, 2025



Tracking motions of humans or objects in the surroundings of the robot is essential to improve safe robot motions and reactions. In this work, we present an approach for scene flow estimation from low-density and noisy point clouds acquired from miniaturized Time of Flight (ToF) sensors distributed on the robot body. The proposed method clusters points from consecutive frames and applies Iterative Closest Point (ICP) to estimate a dense motion flow, with additional steps introduced to mitigate the impact of sensor noise and low-density data points. Specifically, we employ a fitness-based classification to distinguish between stationary and moving points and an inlier removal strategy to refine geometric correspondences. The proposed approach is validated in an experimental setup where 24 ToF are used to estimate the velocity of an object moving at different controlled speeds. Experimental results show that the method consistently approximates the direction of the motion and its magnitude with an error which is in line with sensor noise.
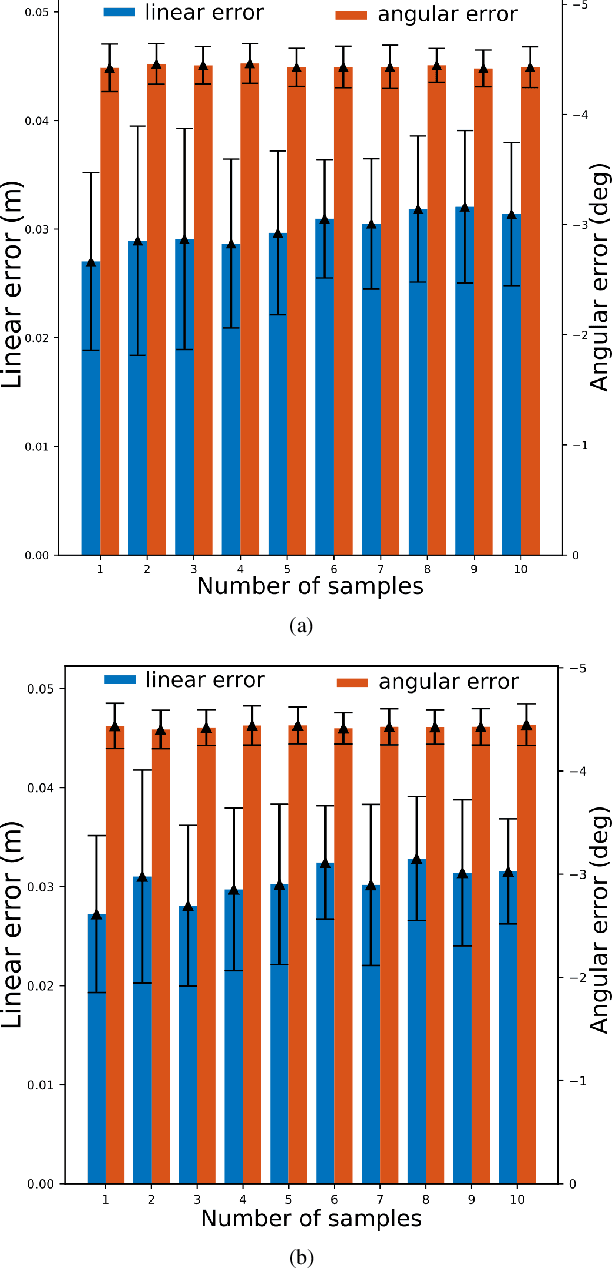
Tiny Lidars for Manipulator Self-Awareness: Sensor Characterization and Initial Localization Experiments
Mar 05, 2025For several tasks, ranging from manipulation to inspection, it is beneficial for robots to localize a target object in their surroundings. In this paper, we propose an approach that utilizes coarse point clouds obtained from miniaturized VL53L5CX Time-of-Flight (ToF) sensors (tiny lidars) to localize a target object in the robot's workspace. We first conduct an experimental campaign to calibrate the dependency of sensor readings on relative range and orientation to targets. We then propose a probabilistic sensor model that is validated in an object pose estimation task using a Particle Filter (PF). The results show that the proposed sensor model improves the performance of the localization of the target object with respect to two baselines: one that assumes measurements are free from uncertainty and one in which the confidence is provided by the sensor datasheet.
Soft Robot Localization Using Distributed Miniaturized Time-of-Flight Sensors
Feb 03, 2025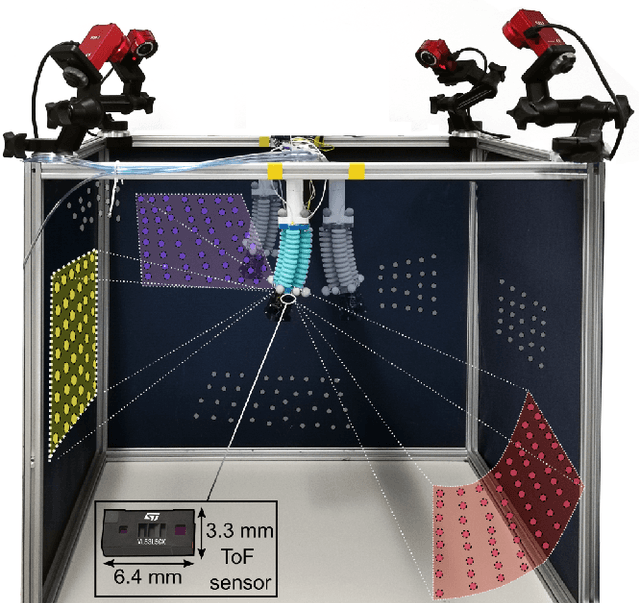
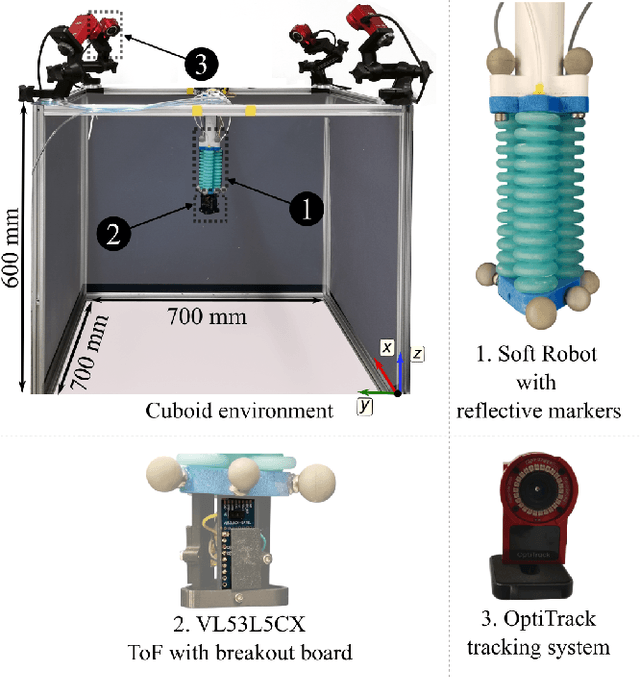

Thanks to their compliance and adaptability, soft robots can be deployed to perform tasks in constrained or complex environments. In these scenarios, spatial awareness of the surroundings and the ability to localize the robot within the environment represent key aspects. While state-of-the-art localization techniques are well-explored in autonomous vehicles and walking robots, they rely on data retrieved with lidar or depth sensors which are bulky and thus difficult to integrate into small soft robots. Recent developments in miniaturized Time of Flight (ToF) sensors show promise as a small and lightweight alternative to bulky sensors. These sensors can be potentially distributed on the soft robot body, providing multi-point depth data of the surroundings. However, the small spatial resolution and the noisy measurements pose a challenge to the success of state-of-the-art localization algorithms, which are generally applied to much denser and more reliable measurements. In this paper, we enforce distributed VL53L5CX ToF sensors, mount them on the tip of a soft robot, and investigate their usage for self-localization tasks. Experimental results show that the soft robot can effectively be localized with respect to a known map, with an error comparable to the uncertainty on the measures provided by the miniaturized ToF sensors.