 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporal Network Creation Games
May 21, 2023
Most networks are not static objects, but instead they change over time. This observation has sparked rigorous research on temporal graphs within the last years. In temporal graphs, we have a fixed set of nodes and the connections between them are only available at certain time steps. This gives rise to a plethora of algorithmic problems on such graphs, most prominently the problem of finding temporal spanners, i.e., the computation of subgraphs that guarantee all pairs reachability via temporal paths. To the best of our knowledge, only centralized approaches for the solution of this problem are known. However, many real-world networks are not shaped by a central designer but instead they emerge and evolve by the interaction of many strategic agents. This observation is the driving force of the recent intensive research on game-theoretic network formation models. In this work we bring together these two recent research directions: temporal graphs and game-theoretic network formation. As a first step into this new realm, we focus on a simplified setting where a complete temporal host graph is given and the agents, corresponding to its nodes, selfishly create incident edges to ensure that they can reach all other nodes via temporal paths in the created network. This yields temporal spanners as equilibria of our game. We prove results on the convergence to and the existence of equilibrium networks, on the complexity of finding best agent strategies, and on the quality of the equilibria. By taking these first important steps, we uncover challenging open problems that call for an in-depth exploration of the creation of temporal graphs by strategic agents.
On the Transformation Capability of Feasible Mechanisms for Programmable Matter
Mar 13, 2017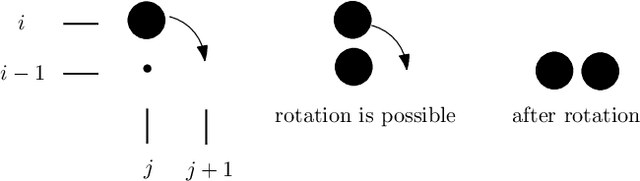
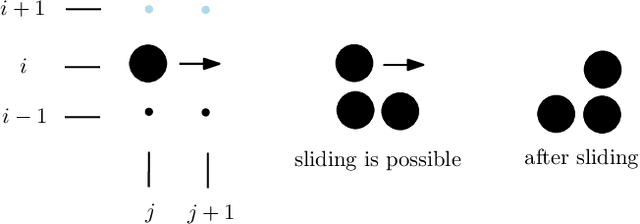
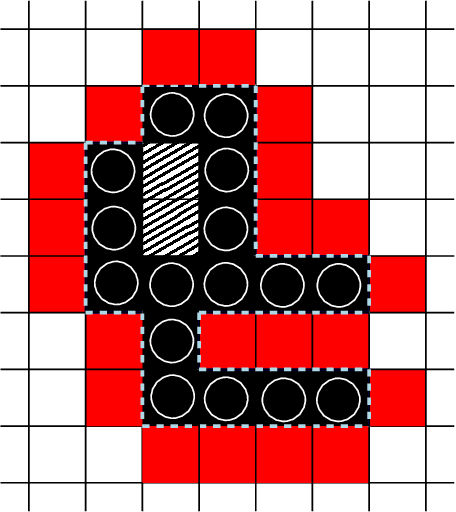
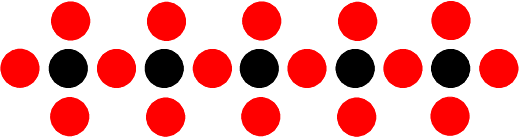
In this work, we study theoretical models of \emph{programmable matter} systems. The systems under consideration consist of spherical modules, kept together by magnetic forces and able to perform two minimal mechanical operations (or movements): \emph{rotate} around a neighbor and \emph{slide} over a line. In terms of modeling, there are $n$ nodes arranged in a 2-dimensional grid and forming some initial \emph{shape}. The goal is for the initial shape $A$ to \emph{transform} to some target shape $B$ by a sequence of movements. Most of the paper focuses on \emph{transformability} questions, meaning whether it is in principle feasible to transform a given shape to another. We first consider the case in which only rotation is available to the nodes. Our main result is that deciding whether two given shapes $A$ and $B$ can be transformed to each other, is in $\mathbf{P}$. We then insist on rotation only and impose the restriction that the nodes must maintain global connectivity throughout the transformation. We prove that the corresponding transformability question is in $\mathbf{PSPACE}$ and study the problem of determining the minimum \emph{seeds} that can make feasible, otherwise infeasible transformations. Next we allow both rotations and slidings and prove universality: any two connected shapes $A,B$ of the same order, can be transformed to each other without breaking connectivity. The worst-case number of movements of the generic strategy is $\Omega(n^2)$. We improve this to $O(n)$ parallel time, by a pipelining strategy, and prove optimality of both by matching lower bounds. In the last part of the paper, we turn our attention to distributed transformations. The nodes are now distributed processes able to perform communicate-compute-move rounds. We provide distributed algorithms for a general type of transformations.