 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
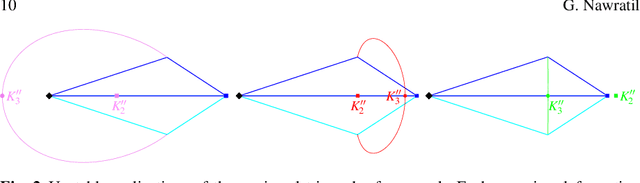
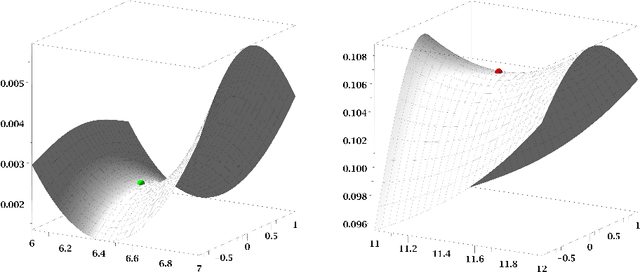
Add to EdgeHigher-Order Flexible Configurations of Planar Parallel Manipulators Constructed by Averaging
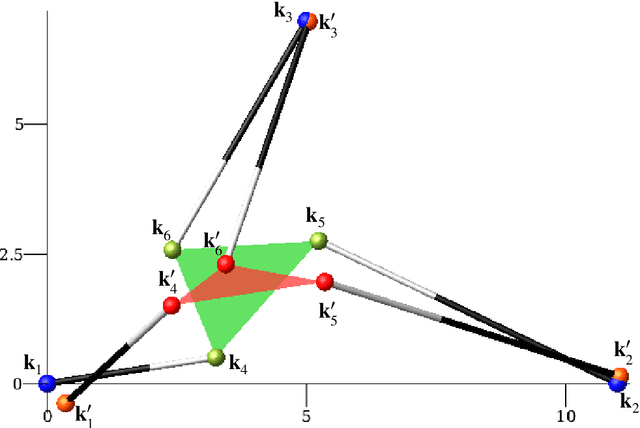
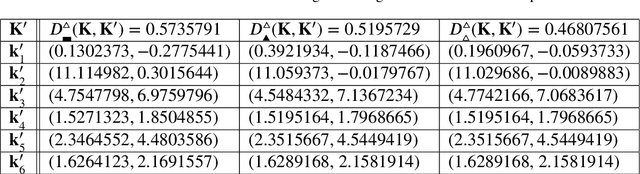
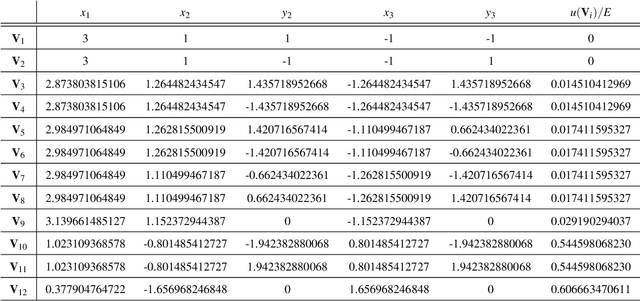
May 04, 2026This paper investigates singular configurations of planar 3-RPR parallel manipulators, which result from applying the averaging technique to solution pairs of their direct kinematic problem. Without computing the zeros of the corresponding degree 6 polynomial we parametrize the input pairs and determine their relative orientation in a way that the flexion order of the averaged configurations increases. Moreover, the obtained results are visualized for concrete examples. The presented methodology can also be used for studying the spherical and spatial analogues of planar 3-RPR parallel manipulators.
Construction and deformation of P-hedra using control polylines
Dec 21, 2025In the 19th International Symposium on Advances in Robot Kinematics the author introduced a novel class of continuous flexible discrete surfaces and mentioned that these so-called P-hedra (or P-nets) allow direct access to their spatial shapes by three control polylines. In this follow-up paper we study this intuitive method, which makes these flexible planar quad surfaces suitable for transformable design tasks by means of interactive tools. The construction of P-hedra from the control polylines can also be used for an efficient algorithmic computation of their isometric deformations. In addition we discuss flexion limits, bifurcation configurations, developable/flat-foldable pattern and tubular P-hedra.
A global approach for the redefinition of higher-order flexibility and rigidity
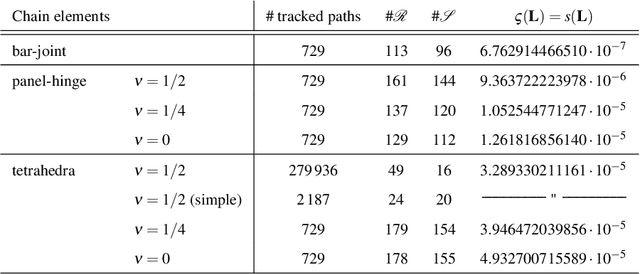
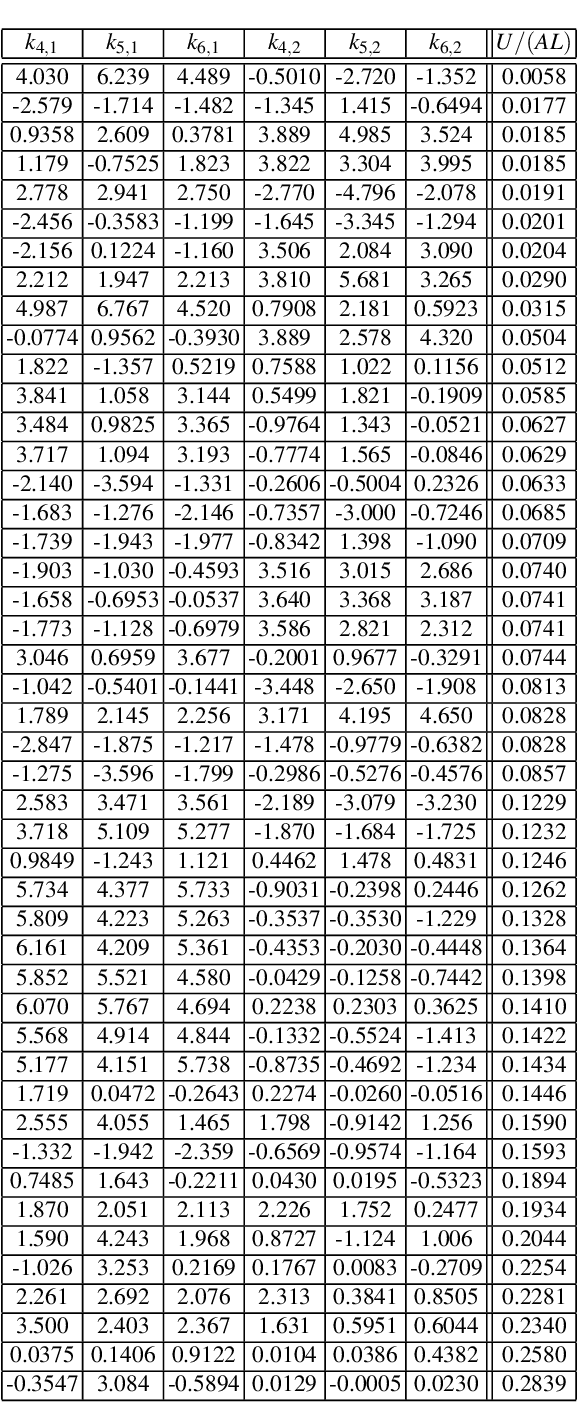
May 24, 2024The famous example of the double-Watt mechanism given by Connelly and Servatius raises some problems concerning the classical definitions of higher-order flexibility and rigidity, respectively, as they attest the cusp configuration of the mechanism a third-order rigidity, which conflicts with its continuous flexion. Some attempts were done to resolve the dilemma but they could not settle the problem. As cusp mechanisms demonstrate the basic shortcoming of any local mobility analysis using higher-order constraints, we present a global approach inspired by Sabitov's finite algorithm for testing the bendability of a polyhedron, which allows us (a) to compute iteratively configurations with a higher-order flexion and (b) to come up with a proper redefinition of higher-order flexibility and rigidity. We also give algorithms for computing the flexion orders as well as the associated flexes. The presented approach is demonstrated on several examples (double-Watt mechanisms and Tarnai's Leonardo structure). Moreover, we determine all configurations of a given 3-RPR manipulator with a third-order flexion and present a corresponding joint-bar framework of flexion order 23.
From axial C-hedra to general P-nets
Jan 09, 2024We give a full classification of continuous flexible discrete axial cone-nets, which are called axial C-hedra. The obtained result can also be used to construct their semi-discrete analogs. Moreover, we identify a novel subclass within the determined class of (semi-)discrete axial cone-nets, whose members are named axial P-nets as they fulfill the proportion (P) of the intercept theorem. Known special cases of these axial P-nets are the smooth and discrete conic crease patterns with reflecting rule lines. By using a parallelism operation one can even generalize axial P-nets. The resulting general P-nets constitute a rich novel class of continuous flexible (semi-)discrete surfaces, which allow direct access to their spatial shapes by three control polylines. This intuitive method makes them suitable for transformable design tasks using interactive tools.
Architecture Singularity Distance Computations for Linear Pentapods
Dec 14, 2023The kinematic/robotic community is not only interested in measuring the closeness of a given robot configuration to its next singular one but also in a geometric meaningful index evaluating how far the robot design is away from being architecturally singular. Such an architecture singularity distance, which can be used by engineers as a criterion within the design process, is presented for a certain class of parallel manipulators of Stewart-Gough type; namely so-called linear pentapods. Geometrically the architecture singular designs are well-understood and can be subclassified into several cases, which allows to solve the optimization problem of computing the closest architecture singular design to a given linear pentapod with algorithms from numerical algebraic geometry.
Singularity Distance Computations of 3-RPR Manipulators Using Intrinsic Metrics
Jul 27, 2023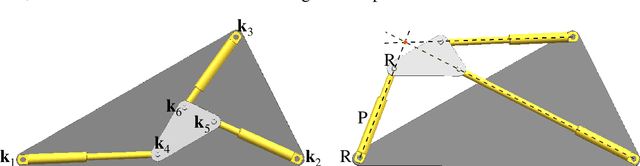

We present an efficient algorithm for computing the closest singular configuration to each non-singular pose of a 3-RPR planar manipulator performing a 1-parametric motion. By considering a 3-RPR manipulator as a planar framework, one can use methods from rigidity theory to compute the singularity distance with respect to an intrinsic metric. There are different design options as the platform/base can be seen as a triangular plate or as a pin-jointed triangular bar structure. Moreover, we also allow the additional possibility of pinning down the base/platform triangle to the fixed/moving system thus it cannot be deformed. For the resulting nine interpretations, we compute the corresponding intrinsic metrics based on the total elastic strain energy density of the framework using the physical concept of Green-Lagrange strain. The global optimization problem of finding the closest singular configuration with respect to these metrics is solved by using tools from numerical algebraic geometry. The proposed algorithm is demonstrated based on an example.
Singularity Distance Computations for 3-RPR Manipulators using Extrinsic Metrics
Apr 27, 2023It is well-known that parallel manipulators are prone to singularities. There is still a lack of distance evaluation functions, referred to as metrics, for computing the distance between two 3-RPR configurations. The presented extrinsic metrics take the combinatorial structure of the manipulator into account as well as different design options. Using these extrinsic metrics, we formulate constrained optimization problems, which aim to find the closest singular configurations for a given non-singular configuration. The solution of the corresponding system of polynomial equations relies on algorithms from numerical algebraic geometry implemented in the software package Bertini. Moreover, we developed a computational pipeline for computing the singularity distance along a 1-parametric motion of the manipulator. To facilitate these computations for the user, an open-source interface is developed between software packages Maple, Bertini, and Paramotopy. The presented approach is demonstrated based on a numerical example.
Snappability and singularity-distance of pin-jointed body-bar frameworks
Jan 07, 2021

It is well-known that there exist rigid frameworks whose physical models can snap between different realizations due to non-destructive elastic deformations of material. We present a method to measure these snapping capability based on the total elastic strain energy density of the framework by using the physical concept of Green-Lagrange strain. As this so-called snappability only depends on the intrinsic framework geometry, it enables a fair comparison of pin-jointed body-bar frameworks, thus it can serve engineers as a criterion within the design process either to avoid snapping phenomena (e.g. truss structures) or to utilize them (e.g. multistable materials). Moreover, it turns out that the value obtained from this intrinsic pseudometric also gives the distance to the closest shaky configuration in the case of isostatic frameworks. Therefore it is also of use for the kinematics community, which is highly interested in the computation of these singularity-distances for diverse mechanical devices. In more detail we study this problem for parallel manipulators of Stewart-Gough type.
On the snappability and singularity-distance of frameworks with bars and triangular plates
Mar 22, 2020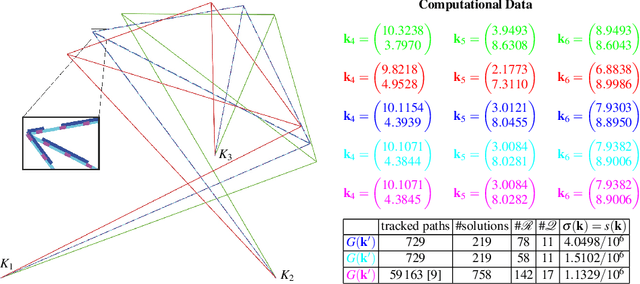
In a recent article the author presented a method to measure the snapping capability -- shortly called snappability -- of bar-joint frameworks based on the total elastic strain energy by computing the deformation of all bars using Hooke's law and the definition of Cauchy/Engineering strain. Within the paper at hand, we extend this approach to frameworks composed of bars and triangular plates by using the physical concept of Green-Lagrange strain. An intrinsic pseudometric based on the resulting total elastic strain energy density cannot only be used for evaluating the snappability but also for measuring the distance to the closest singular configuration. The presented methods are demonstrated on the basis of the 3-legged planar parallel manipulator.
Evaluating the snappability of bar-joint frameworks
Jan 13, 2020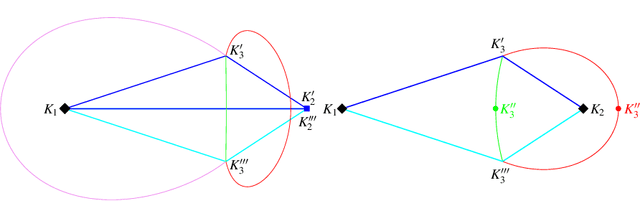
It is well-known that there exist bar-joint frameworks (without continuous flexions) whose physical models can snap between different realizations due to non-destructive elastic deformations of material. We present a method to measure these snapping capability -- shortly called snappability -- based on the total elastic strain energy of the framework by computing the deformation of all bars using Hook's law. The presented theoretical results give further connections between shakiness and snapping beside the well-known technique of averaging and deaveraging.