 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTEACH: Temporal Variance-Driven Curriculum for Reinforcement Learning
Dec 28, 2025Reinforcement Learning (RL) has achieved significant success in solving single-goal tasks. However, uniform goal selection often results in sample inefficiency in multi-goal settings where agents must learn a universal goal-conditioned policy. Inspired by the adaptive and structured learning processes observed in biological systems, we propose a novel Student-Teacher learning paradigm with a Temporal Variance-Driven Curriculum to accelerate Goal-Conditioned RL. In this framework, the teacher module dynamically prioritizes goals with the highest temporal variance in the policy's confidence score, parameterized by the state-action value (Q) function. The teacher provides an adaptive and focused learning signal by targeting these high-uncertainty goals, fostering continual and efficient progress. We establish a theoretical connection between the temporal variance of Q-values and the evolution of the policy, providing insights into the method's underlying principles. Our approach is algorithm-agnostic and integrates seamlessly with existing RL frameworks. We demonstrate this through evaluation across 11 diverse robotic manipulation and maze navigation tasks. The results show consistent and notable improvements over state-of-the-art curriculum learning and goal-selection methods.
MOORL: A Framework for Integrating Offline-Online Reinforcement Learning
Jun 11, 2025



Sample efficiency and exploration remain critical challenges in Deep Reinforcement Learning (DRL), particularly in complex domains. Offline RL, which enables agents to learn optimal policies from static, pre-collected datasets, has emerged as a promising alternative. However, offline RL is constrained by issues such as out-of-distribution (OOD) actions that limit policy performance and generalization. To overcome these limitations, we propose Meta Offline-Online Reinforcement Learning (MOORL), a hybrid framework that unifies offline and online RL for efficient and scalable learning. While previous hybrid methods rely on extensive design components and added computational complexity to utilize offline data effectively, MOORL introduces a meta-policy that seamlessly adapts across offline and online trajectories. This enables the agent to leverage offline data for robust initialization while utilizing online interactions to drive efficient exploration. Our theoretical analysis demonstrates that the hybrid approach enhances exploration by effectively combining the complementary strengths of offline and online data. Furthermore, we demonstrate that MOORL learns a stable Q-function without added complexity. Extensive experiments on 28 tasks from the D4RL and V-D4RL benchmarks validate its effectiveness, showing consistent improvements over state-of-the-art offline and hybrid RL baselines. With minimal computational overhead, MOORL achieves strong performance, underscoring its potential for practical applications in real-world scenarios.
Bin-picking of novel objects through category-agnostic-segmentation: RGB matters
Dec 27, 2023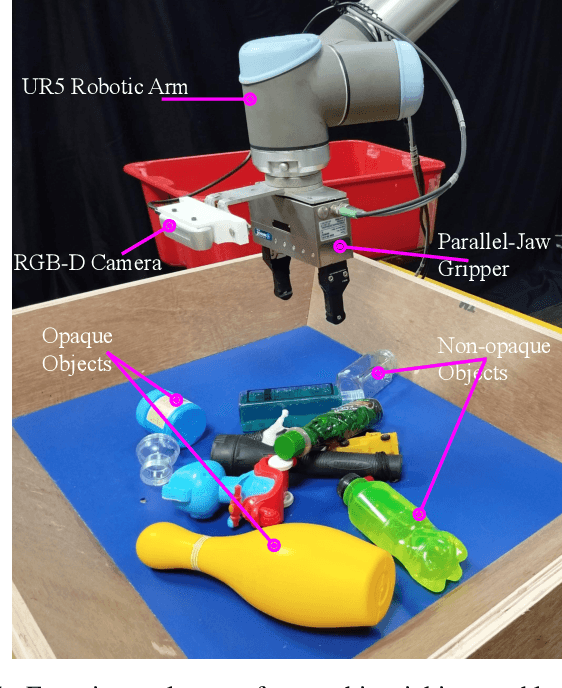
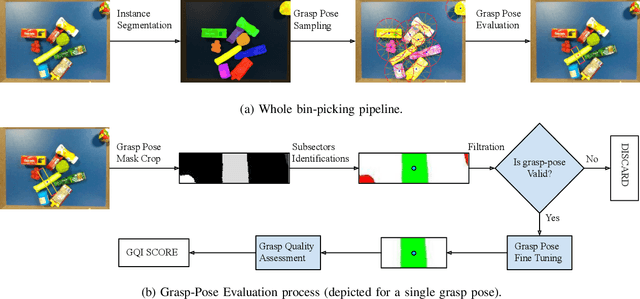
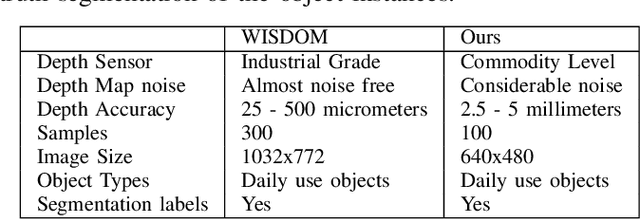
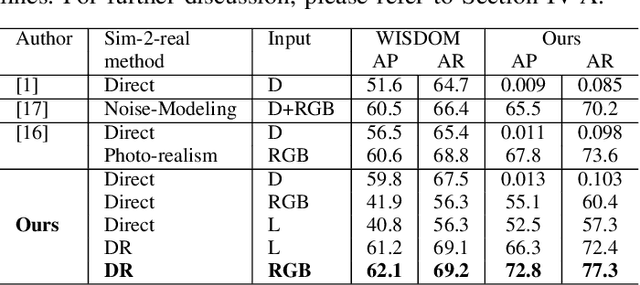
This paper addresses category-agnostic instance segmentation for robotic manipulation, focusing on segmenting objects independent of their class to enable versatile applications like bin-picking in dynamic environments. Existing methods often lack generalizability and object-specific information, leading to grasp failures. We present a novel approach leveraging object-centric instance segmentation and simulation-based training for effective transfer to real-world scenarios. Notably, our strategy overcomes challenges posed by noisy depth sensors, enhancing the reliability of learning. Our solution accommodates transparent and semi-transparent objects which are historically difficult for depth-based grasping methods. Contributions include domain randomization for successful transfer, our collected dataset for warehouse applications, and an integrated framework for efficient bin-picking. Our trained instance segmentation model achieves state-of-the-art performance over WISDOM public benchmark [1] and also over the custom-created dataset. In a real-world challenging bin-picking setup our bin-picking framework method achieves 98% accuracy for opaque objects and 97% accuracy for non-opaque objects, outperforming the state-of-the-art baselines with a greater margin.
Predicting the performance of hybrid ventilation in buildings using a multivariate attention-based biLSTM Encoder-Decoder neural network
Feb 08, 2023Hybrid ventilation (coupling natural and mechanical ventilation) is an energy-efficient solution to provide fresh air for most climates, given that it has a reliable control system. To operate such systems optimally, a high-fidelity control-oriented model is required. It should enable near-real time forecast of the indoor air temperature and humidity based on operational conditions such as window opening and HVAC schedules. However, widely used physics-based simulation models (i.e., white-box models) are labour-intensive and computationally expensive. Alternatively, black-box models based on artificial neural networks can be trained to be good estimators for building dynamics. This paper investigates the capabilities of a multivariate multi-head attention-based long short-term memory (LSTM) encoder-decoder neural network to predict indoor air conditions of a building equipped with hybrid ventilation. The deep neural network used for this study aims to predict indoor air temperature dynamics when a window is opened and closed, respectively. Training and test data were generated from detailed multi-zone office building model (EnergyPlus). The deep neural network is able to accurately predict indoor air temperature of five zones whenever a window was opened and closed.
CWD: A Machine Learning based Approach to Detect Unknown Cloud Workloads
Nov 28, 2022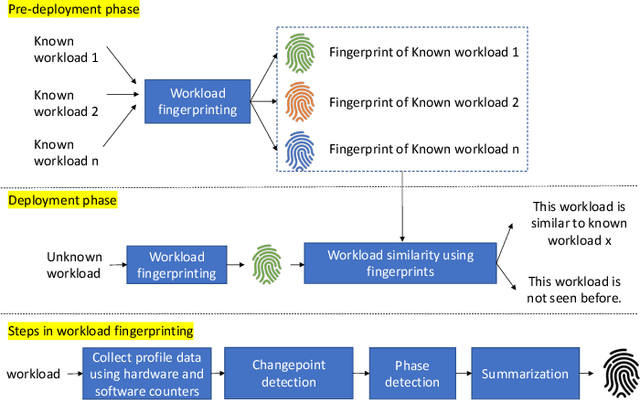
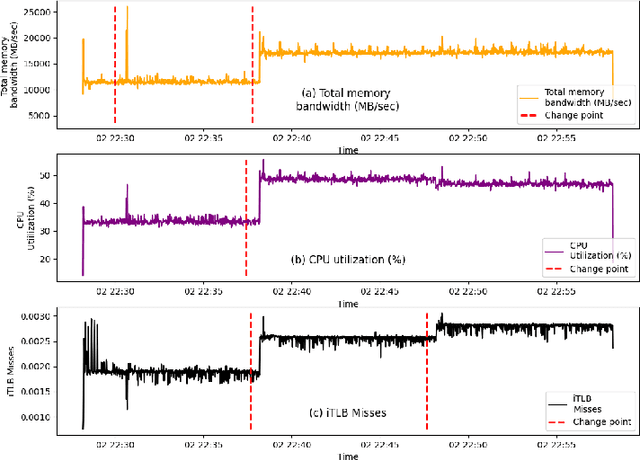
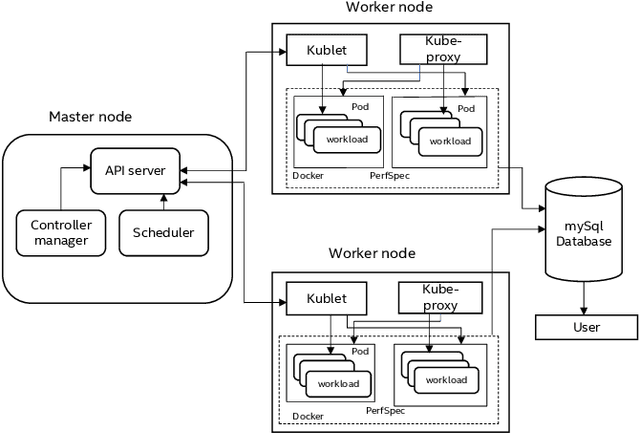
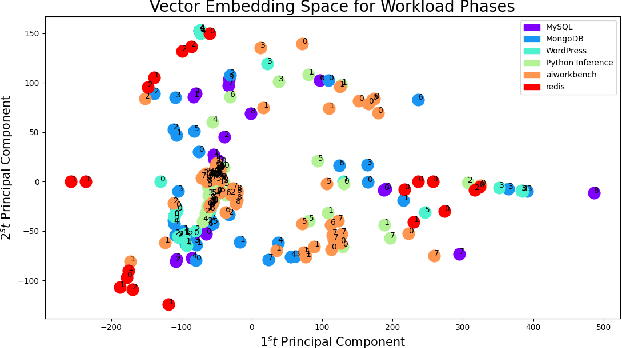
Workloads in modern cloud data centers are becoming increasingly complex. The number of workloads running in cloud data centers has been growing exponentially for the last few years, and cloud service providers (CSP) have been supporting on-demand services in real-time. Realizing the growing complexity of cloud environment and cloud workloads, hardware vendors such as Intel and AMD are increasingly introducing cloud-specific workload acceleration features in their CPU platforms. These features are typically targeted towards popular and commonly-used cloud workloads. Nonetheless, uncommon, customer-specific workloads (unknown workloads), if their characteristics are different from common workloads (known workloads), may not realize the potential of the underlying platform. To address this problem of realizing the full potential of the underlying platform, we develop a machine learning based technique to characterize, profile and predict workloads running in the cloud environment. Experimental evaluation of our technique demonstrates good prediction performance. We also develop techniques to analyze the performance of the model in a standalone manner.