 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning Strain Estimation: Is Physics-Based Simulation the Solution?
May 27, 2026Speckle tracking echocardiography (STE) is the clinical standard for myocardial strain estimation. Despite good performance on global strain (GLS), its accuracy for regional strain remains limited, even though this biomarker is highly relevant for early diagnosis and the characterization of subtle abnormalities. from clinical data. Deep learning is a promising alternative, but its development is constrained by the lack of reliable motion references. Existing solutions rely either on STE-derived labels or on simulations generated by physics-based models, but these synthetic sequences still have limited realism compared with clinical data.In this paper, we propose a novel simulation strategy that incorporates speckle decorrelation measures from real videos and uses an iterative refinement process to improve the motion realism in the simulations. We created an open-source photorealistic dataset of 1,478 videos with reference motion, which was used to train an echocardiographic motion estimation algorithm. The proposed method achieves unmatched performance on global and regional strain, notably reaching a GLS variability of 1.42% in an inter-expert setting compared to 1.78% for the clinical reference.
SegDesicNet: Lightweight Semantic Segmentation in Remote Sensing with Geo-Coordinate Embeddings for Domain Adaptation
Mar 11, 2025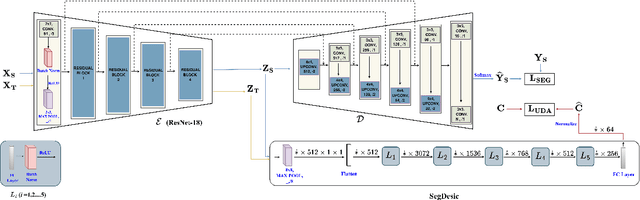

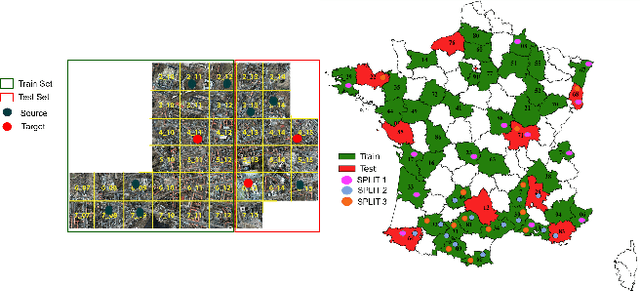
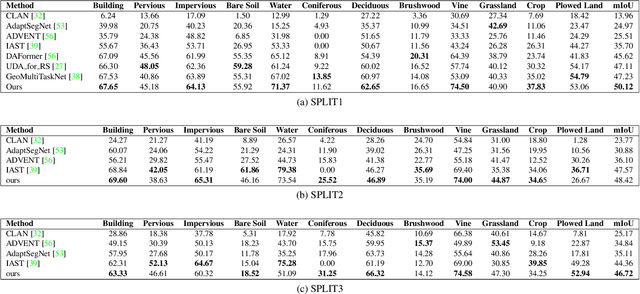
Semantic segmentation is essential for analyzing highdefinition remote sensing images (HRSIs) because it allows the precise classification of objects and regions at the pixel level. However, remote sensing data present challenges owing to geographical location, weather, and environmental variations, making it difficult for semantic segmentation models to generalize across diverse scenarios. Existing methods are often limited to specific data domains and require expert annotators and specialized equipment for semantic labeling. In this study, we propose a novel unsupervised domain adaptation technique for remote sensing semantic segmentation by utilizing geographical coordinates that are readily accessible in remote sensing setups as metadata in a dataset. To bridge the domain gap, we propose a novel approach that considers the combination of an image\'s location encoding trait and the spherical nature of Earth\'s surface. Our proposed SegDesicNet module regresses the GRID positional encoding of the geo coordinates projected over the unit sphere to obtain the domain loss. Our experimental results demonstrate that the proposed SegDesicNet outperforms state of the art domain adaptation methods in remote sensing image segmentation, achieving an improvement of approximately ~6% in the mean intersection over union (MIoU) with a ~ 27\% drop in parameter count on benchmarked subsets of the publicly available FLAIR #1 dataset. We also benchmarked our method performance on the custom split of the ISPRS Potsdam dataset. Our algorithm seeks to reduce the modeling disparity between artificial neural networks and human comprehension of the physical world, making the technology more human centric and scalable.
* https://openaccess.thecvf.com/content/WACV2025/papers/Verma_SegDesicNet_Lightweight_Semantic_Segmentation_in_Remote_Sensing_with_Geo-Coordinate_Embeddings_WACV_2025_paper.pdf
Segmentation of Non-Small Cell Lung Carcinomas: Introducing DRU-Net and Multi-Lens Distortion
Jun 20, 2024
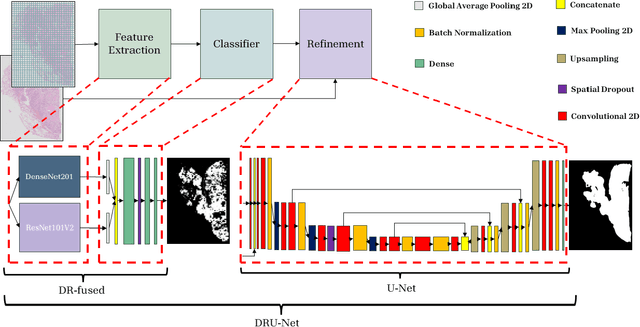
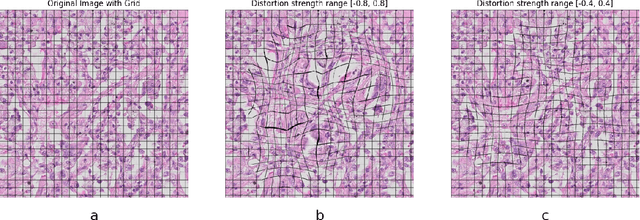
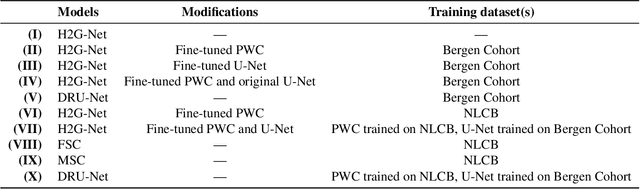
Considering the increased workload in pathology laboratories today, automated tools such as artificial intelligence models can help pathologists with their tasks and ease the workload. In this paper, we are proposing a segmentation model (DRU-Net) that can provide a delineation of human non-small cell lung carcinomas and an augmentation method that can improve classification results. The proposed model is a fused combination of truncated pre-trained DenseNet201 and ResNet101V2 as a patch-wise classifier followed by a lightweight U-Net as a refinement model. We have used two datasets (Norwegian Lung Cancer Biobank and Haukeland University Hospital lung cancer cohort) to create our proposed model. The DRU-Net model achieves an average of 0.91 Dice similarity coefficient. The proposed spatial augmentation method (multi-lens distortion) improved the network performance by 3%. Our findings show that choosing image patches that specifically include regions of interest leads to better results for the patch-wise classifier compared to other sampling methods. The qualitative analysis showed that the DRU-Net model is generally successful in detecting the tumor. On the test set, some of the cases showed areas of false positive and false negative segmentation in the periphery, particularly in tumors with inflammatory and reactive changes.
Deep HM-SORT: Enhancing Multi-Object Tracking in Sports with Deep Features, Harmonic Mean, and Expansion IOU
Jun 17, 2024
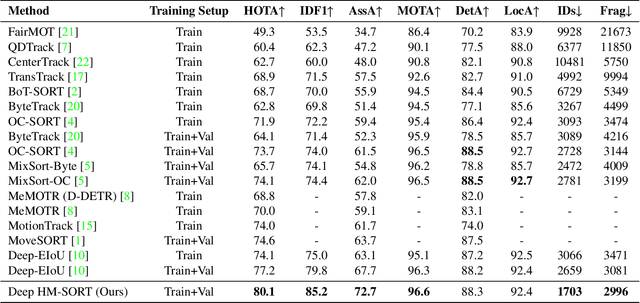
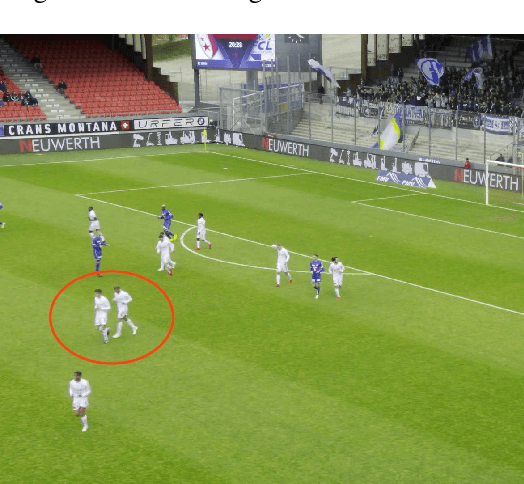
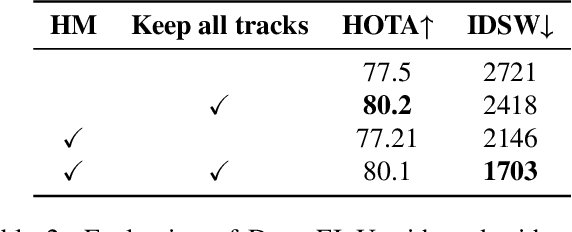
This paper introduces Deep HM-SORT, a novel online multi-object tracking algorithm specifically designed to enhance the tracking of athletes in sports scenarios. Traditional multi-object tracking methods often struggle with sports environments due to the similar appearances of players, irregular and unpredictable movements, and significant camera motion. Deep HM-SORT addresses these challenges by integrating deep features, harmonic mean, and Expansion IOU. By leveraging the harmonic mean, our method effectively balances appearance and motion cues, significantly reducing ID-swaps. Additionally, our approach retains all tracklets indefinitely, improving the re-identification of players who leave and re-enter the frame. Experimental results demonstrate that Deep HM-SORT achieves state-of-the-art performance on two large-scale public benchmarks, SportsMOT and SoccerNet Tracking Challenge 2023. Specifically, our method achieves 80.1 HOTA on the SportsMOT dataset and 85.4 HOTA on the SoccerNet-Tracking dataset, outperforming existing trackers in key metrics such as HOTA, IDF1, AssA, and MOTA. This robust solution provides enhanced accuracy and reliability for automated sports analytics, offering significant improvements over previous methods without introducing additional computational cost.
Geo-locating Road Objects using Inverse Haversine Formula with NVIDIA Driveworks
Jan 15, 2024Geolocation is integral to the seamless functioning of autonomous vehicles and advanced traffic monitoring infrastructures. This paper introduces a methodology to geolocate road objects using a monocular camera, leveraging the NVIDIA DriveWorks platform. We use the Centimeter Positioning Service (CPOS) and the inverse Haversine formula to geo-locate road objects accurately. The real-time algorithm processing capability of the NVIDIA DriveWorks platform enables instantaneous object recognition and spatial localization for Advanced Driver Assistance Systems (ADAS) and autonomous driving platforms. We present a measurement pipeline suitable for autonomous driving (AD) platforms and provide detailed guidelines for calibrating cameras using NVIDIA DriveWorks. Experiments were carried out to validate the accuracy of the proposed method for geolocating targets in both controlled and dynamic settings. We show that our approach can locate targets with less than 1m error when the AD platform is stationary and less than 4m error at higher speeds (i.e. up to 60km/h) within a 15m radius.
Teacher-Student Architecture for Mixed Supervised Lung Tumor Segmentation
Dec 21, 2021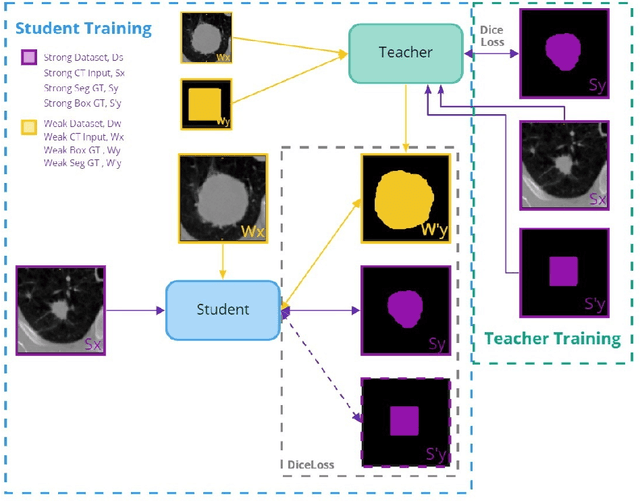
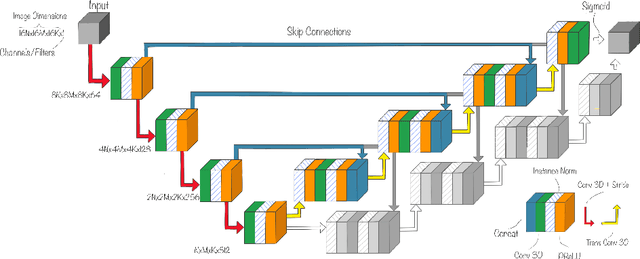
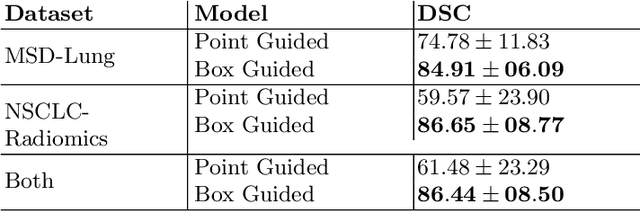
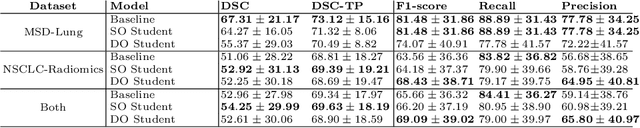
Purpose: Automating tasks such as lung tumor localization and segmentation in radiological images can free valuable time for radiologists and other clinical personnel. Convolutional neural networks may be suited for such tasks, but require substantial amounts of labeled data to train. Obtaining labeled data is a challenge, especially in the medical domain. Methods: This paper investigates the use of a teacher-student design to utilize datasets with different types of supervision to train an automatic model performing pulmonary tumor segmentation on computed tomography images. The framework consists of two models: the student that performs end-to-end automatic tumor segmentation and the teacher that supplies the student additional pseudo-annotated data during training. Results: Using only a small proportion of semantically labeled data and a large number of bounding box annotated data, we achieved competitive performance using a teacher-student design. Models trained on larger amounts of semantic annotations did not perform better than those trained on teacher-annotated data. Conclusions: Our results demonstrate the potential of utilizing teacher-student designs to reduce the annotation load, as less supervised annotation schemes may be performed, without any real degradation in segmentation accuracy.