 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWalk These Ways: Tuning Robot Control for Generalization with Multiplicity of Behavior
Dec 06, 2022



Learned locomotion policies can rapidly adapt to diverse environments similar to those experienced during training but lack a mechanism for fast tuning when they fail in an out-of-distribution test environment. This necessitates a slow and iterative cycle of reward and environment redesign to achieve good performance on a new task. As an alternative, we propose learning a single policy that encodes a structured family of locomotion strategies that solve training tasks in different ways, resulting in Multiplicity of Behavior (MoB). Different strategies generalize differently and can be chosen in real-time for new tasks or environments, bypassing the need for time-consuming retraining. We release a fast, robust open-source MoB locomotion controller, Walk These Ways, that can execute diverse gaits with variable footswing, posture, and speed, unlocking diverse downstream tasks: crouching, hopping, high-speed running, stair traversal, bracing against shoves, rhythmic dance, and more. Video and code release: https://gmargo11.github.io/walk-these-ways/
Rapid Locomotion via Reinforcement Learning
May 05, 2022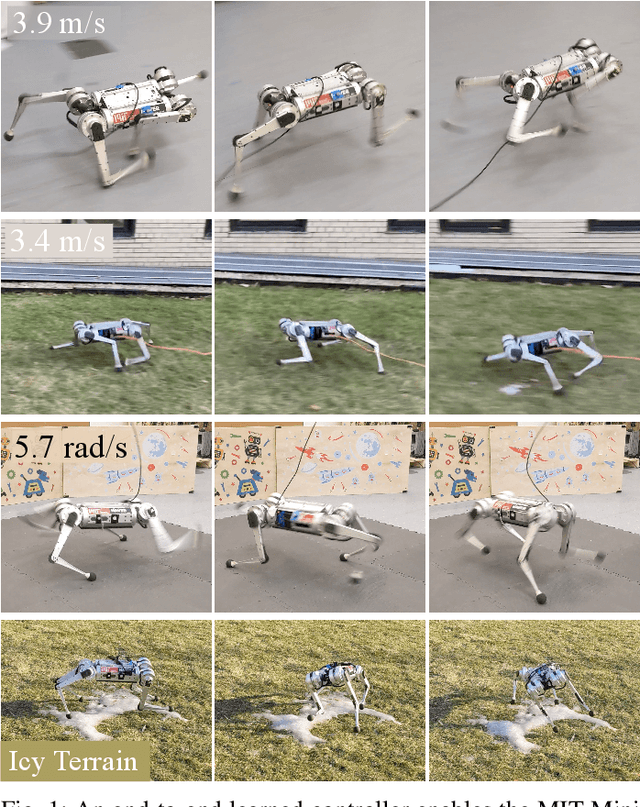
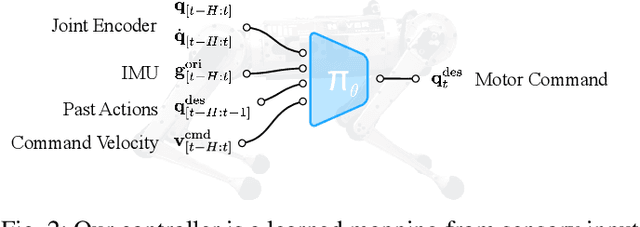
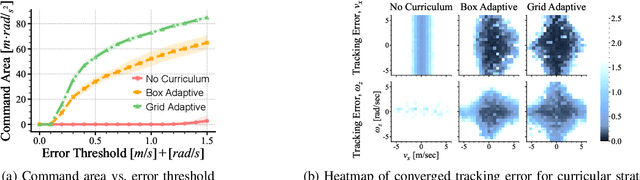

Agile maneuvers such as sprinting and high-speed turning in the wild are challenging for legged robots. We present an end-to-end learned controller that achieves record agility for the MIT Mini Cheetah, sustaining speeds up to 3.9 m/s. This system runs and turns fast on natural terrains like grass, ice, and gravel and responds robustly to disturbances. Our controller is a neural network trained in simulation via reinforcement learning and transferred to the real world. The two key components are (i) an adaptive curriculum on velocity commands and (ii) an online system identification strategy for sim-to-real transfer leveraged from prior work. Videos of the robot's behaviors are available at: https://agility.csail.mit.edu/