Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRapid Locomotion via Reinforcement Learning
Paper and Code
May 05, 2022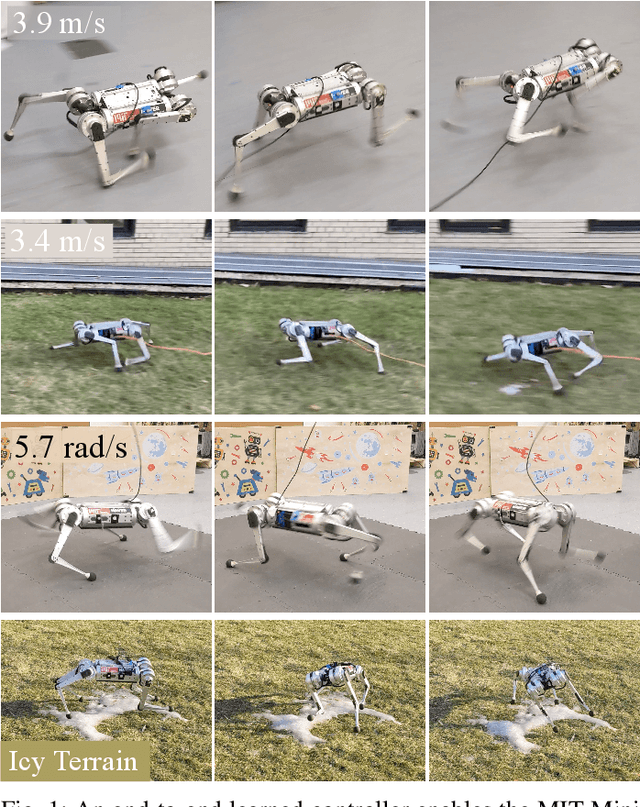
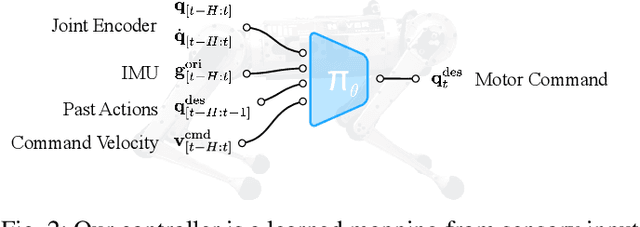

Agile maneuvers such as sprinting and high-speed turning in the wild are challenging for legged robots. We present an end-to-end learned controller that achieves record agility for the MIT Mini Cheetah, sustaining speeds up to 3.9 m/s. This system runs and turns fast on natural terrains like grass, ice, and gravel and responds robustly to disturbances. Our controller is a neural network trained in simulation via reinforcement learning and transferred to the real world. The two key components are (i) an adaptive curriculum on velocity commands and (ii) an online system identification strategy for sim-to-real transfer leveraged from prior work. Videos of the robot's behaviors are available at: https://agility.csail.mit.edu/
* Accepted for publication at Robotics: Science and Systems (RSS) 2022
View paper on