 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Attention Mechanism in Time Series Classification
Jul 14, 2022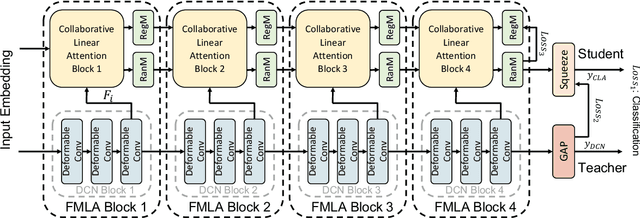
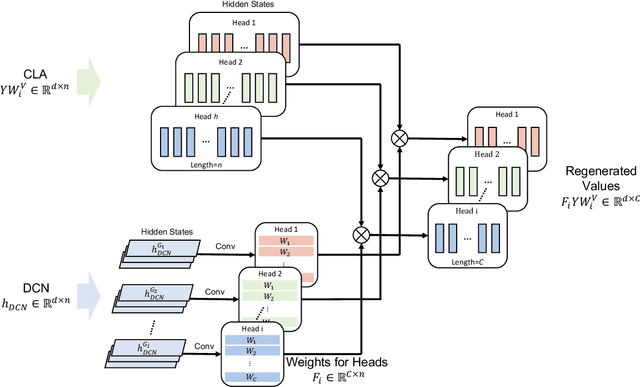
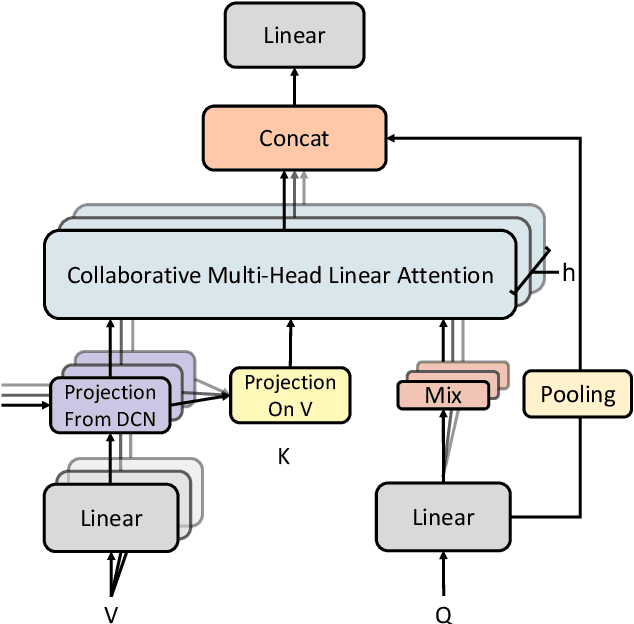
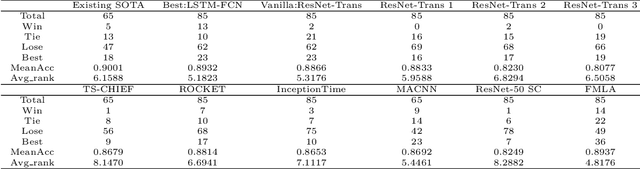
Attention-based models have been widely used in many areas, such as computer vision and natural language processing. However, relevant applications in time series classification (TSC) have not been explored deeply yet, causing a significant number of TSC algorithms still suffer from general problems of attention mechanism, like quadratic complexity. In this paper, we promote the efficiency and performance of the attention mechanism by proposing our flexible multi-head linear attention (FMLA), which enhances locality awareness by layer-wise interactions with deformable convolutional blocks and online knowledge distillation. What's more, we propose a simple but effective mask mechanism that helps reduce the noise influence in time series and decrease the redundancy of the proposed FMLA by masking some positions of each given series proportionally. To stabilize this mechanism, samples are forwarded through the model with random mask layers several times and their outputs are aggregated to teach the same model with regular mask layers. We conduct extensive experiments on 85 UCR2018 datasets to compare our algorithm with 11 well-known ones and the results show that our algorithm has comparable performance in terms of top-1 accuracy. We also compare our model with three Transformer-based models with respect to the floating-point operations per second and number of parameters and find that our algorithm achieves significantly better efficiency with lower complexity.
On Jointly Optimizing Partial Offloading and SFC Mapping: A Cooperative Dual-agent Deep Reinforcement Learning Approach
May 20, 2022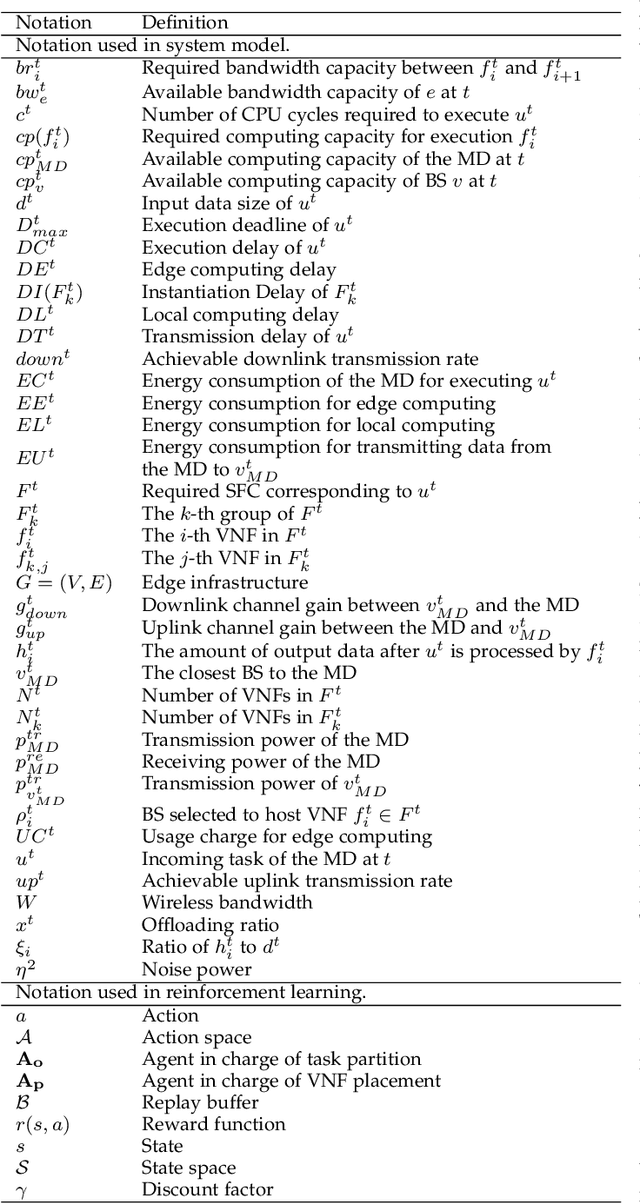
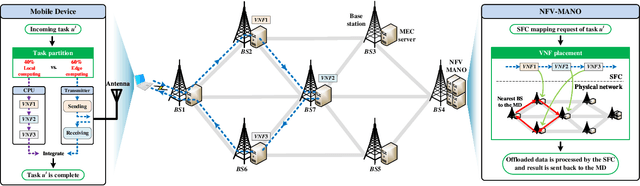
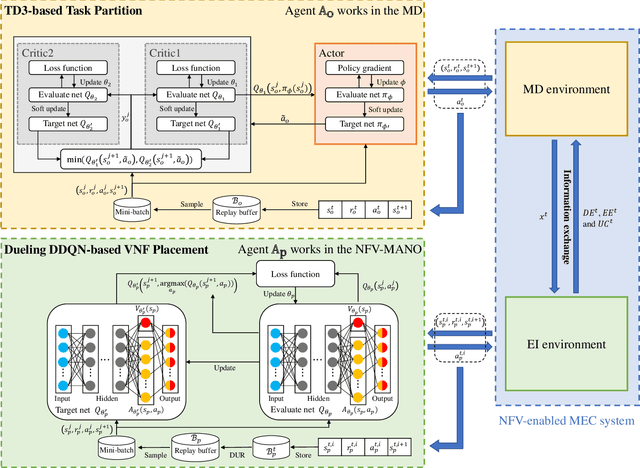
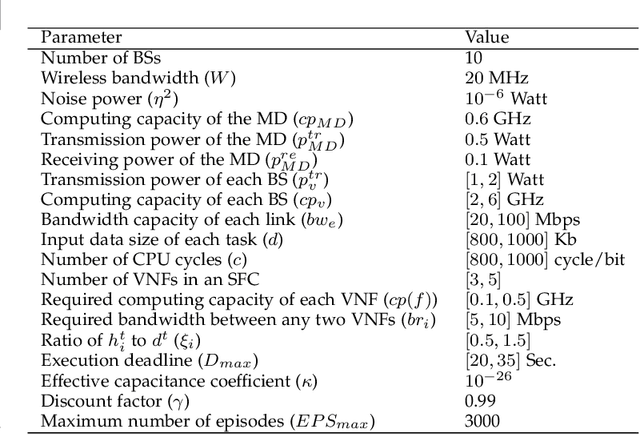
Multi-access edge computing (MEC) and network function virtualization (NFV) are promising technologies to support emerging IoT applications, especially those computation-intensive. In NFV-enabled MEC environment, service function chain (SFC), i.e., a set of ordered virtual network functions (VNFs), can be mapped on MEC servers. Mobile devices (MDs) can offload computation-intensive applications, which can be represented by SFCs, fully or partially to MEC servers for remote execution. This paper studies the partial offloading and SFC mapping joint optimization (POSMJO) problem in an NFV-enabled MEC system, where an incoming task can be partitioned into two parts, one for local execution and the other for remote execution. The objective is to minimize the average cost in the long term which is a combination of execution delay, MD's energy consumption, and usage charge for edge computing. This problem consists of two closely related decision-making steps, namely task partition and VNF placement, which is highly complex and quite challenging. To address this, we propose a cooperative dual-agent deep reinforcement learning (CDADRL) algorithm, where we design a framework enabling interaction between two agents. Simulation results show that the proposed algorithm outperforms three combinations of deep reinforcement learning algorithms in terms of cumulative and average episodic rewards and it overweighs a number of baseline algorithms with respect to execution delay, energy consumption, and usage charge.
Evolutionary Multi-Objective Reinforcement Learning Based Trajectory Control and Task Offloading in UAV-Assisted Mobile Edge Computing
Feb 24, 2022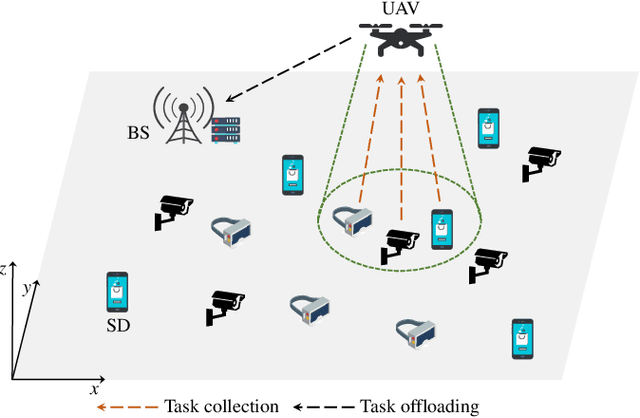
This paper studies the trajectory control and task offloading (TCTO) problem in an unmanned aerial vehicle (UAV)-assisted mobile edge computing system, where a UAV flies along a planned trajectory to collect computation tasks from smart devices (SDs). We consider a scenario that SDs are not directly connected by the base station (BS) and the UAV has two roles to play: MEC server or wireless relay. The UAV makes task offloading decisions online, in which the collected tasks can be executed locally on the UAV or offloaded to the BS for remote processing. The TCTO problem involves multi-objective optimization as its objectives are to minimize the task delay and the UAV's energy consumption, and maximize the number of tasks collected by the UAV, simultaneously. This problem is challenging because the three objectives conflict with each other. The existing reinforcement learning (RL) algorithms, either single-objective RLs or single-policy multi-objective RLs, cannot well address the problem since they cannot output multiple policies for various preferences (i.e. weights) across objectives in a single run. This paper adapts the evolutionary multi-objective RL (EMORL), a multi-policy multi-objective RL, to the TCTO problem. This algorithm can output multiple optimal policies in just one run, each optimizing a certain preference. The simulation results demonstrate that the proposed algorithm can obtain more excellent nondominated policies by striking a balance between the three objectives regarding policy quality, compared with two evolutionary and two multi-policy RL algorithms.