 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVibration of Soft, Twisted Beams for Under-Actuated Quadrupedal Locomotion
Jul 03, 2025Under-actuated compliant robotic systems offer a promising approach to mitigating actuation and control challenges by harnessing pre-designed, embodied dynamic behaviors. This paper presents Flix-Walker, a novel, untethered, centimeter-scale quadrupedal robot inspired by compliant under-actuated mechanisms. Flix-Walker employs flexible, helix-shaped beams as legs, which are actuated by vibrations from just two motors to achieve three distinct mobility modes. We analyze the actuation parameters required to generate various locomotion modes through both simulation and prototype experiments. The effects of system and environmental variations on locomotion performance are examined, and we propose a generic metric for selecting control parameters that produce robust and functional motions. Experiments validate the effectiveness and robustness of these actuation parameters within a closed-loop control framework, demonstrating reliable trajectory-tracking and self-navigation capabilities.
Tunable Dynamic Walking via Soft Twisted Beam Vibration
Nov 01, 2022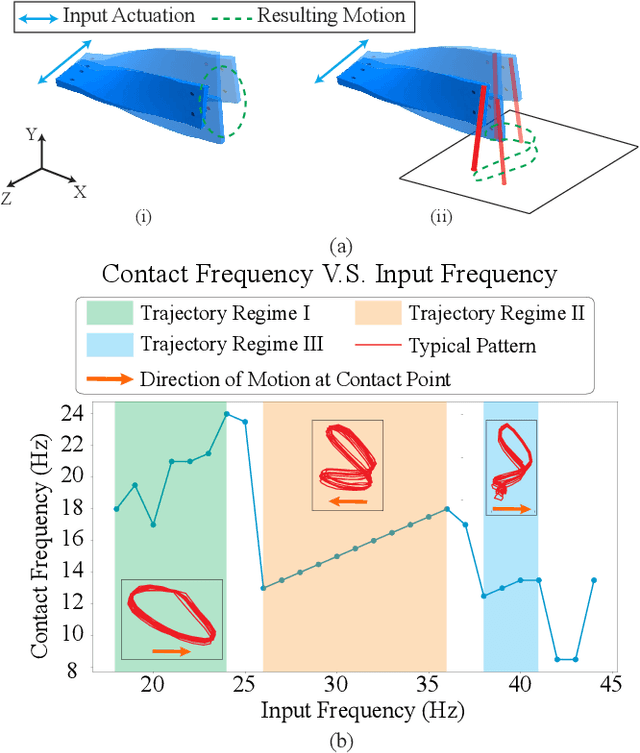
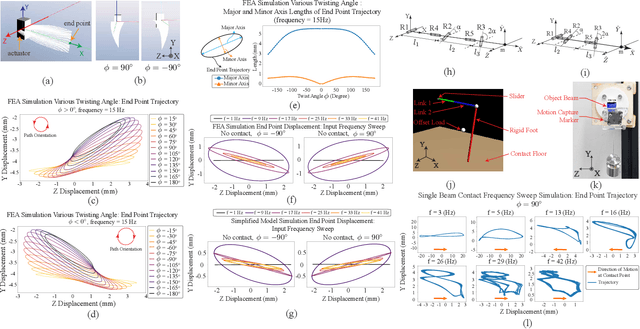
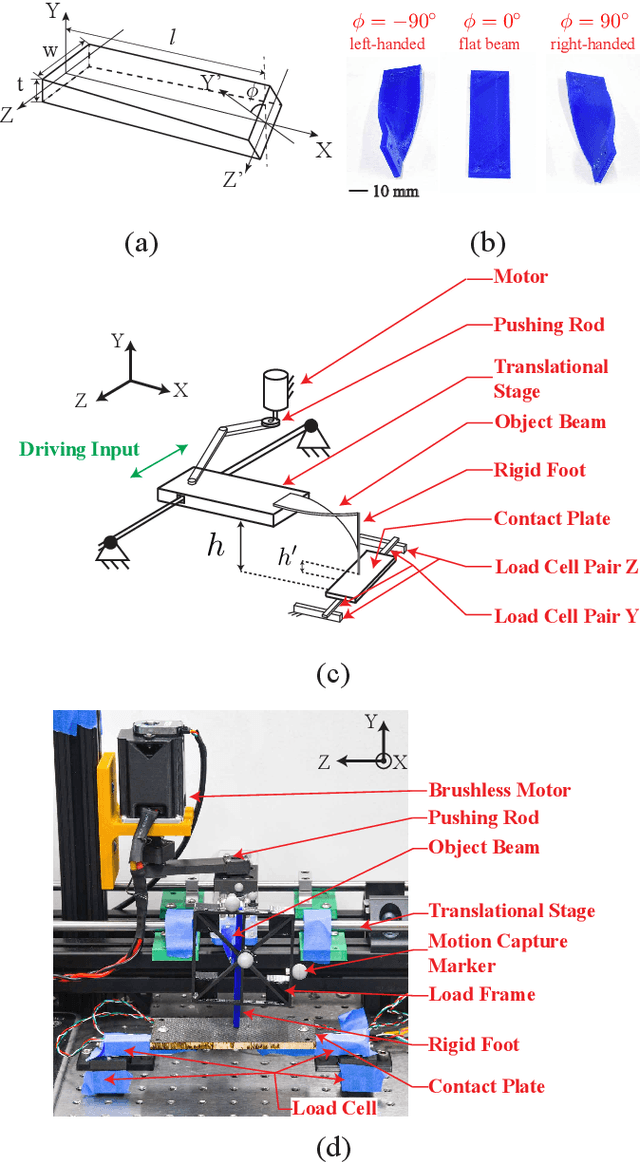
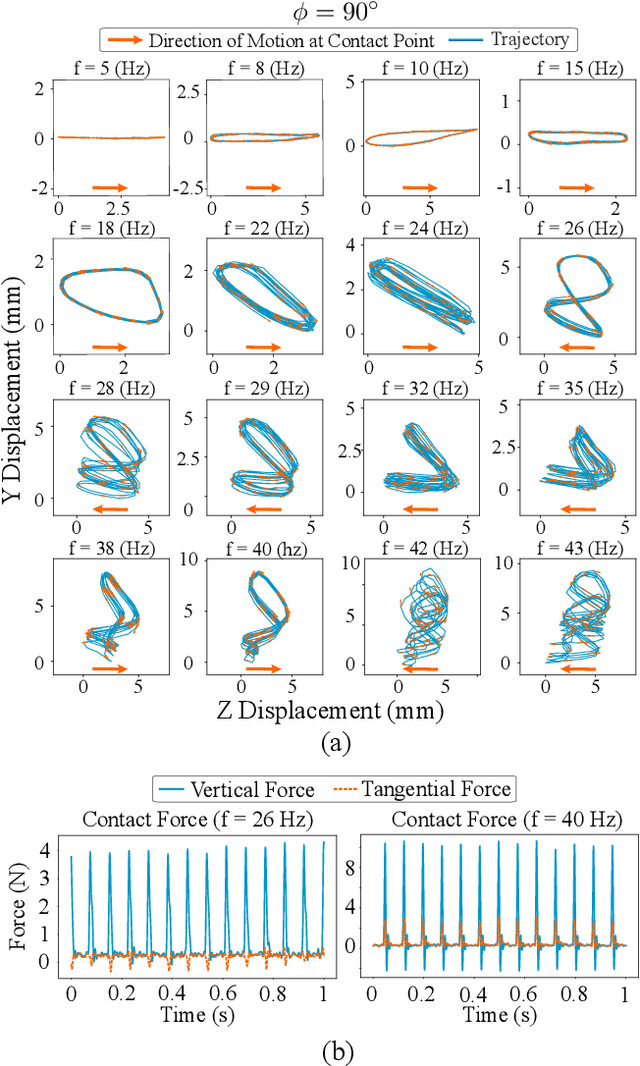
We propose a novel mechanism that propagates vibration through soft twisted beams, taking advantage of dynamically-coupled anisotropic stiffness to simplify the actuation of walking robots. Using dynamic simulation and experimental approaches, we show that the coupled stiffness of twisted beams with terrain contact can be controlled to generate a variety of complex trajectories by changing the frequency of the input signal. This work reveals how ground contact influences the system's dynamic behavior, supporting the design of walking robots inspired by this phenomenon. We also show that the proposed twisted beam produces a tunable walking gait from a single vibrational input.