Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTunable Dynamic Walking via Soft Twisted Beam Vibration
Paper and Code
Nov 01, 2022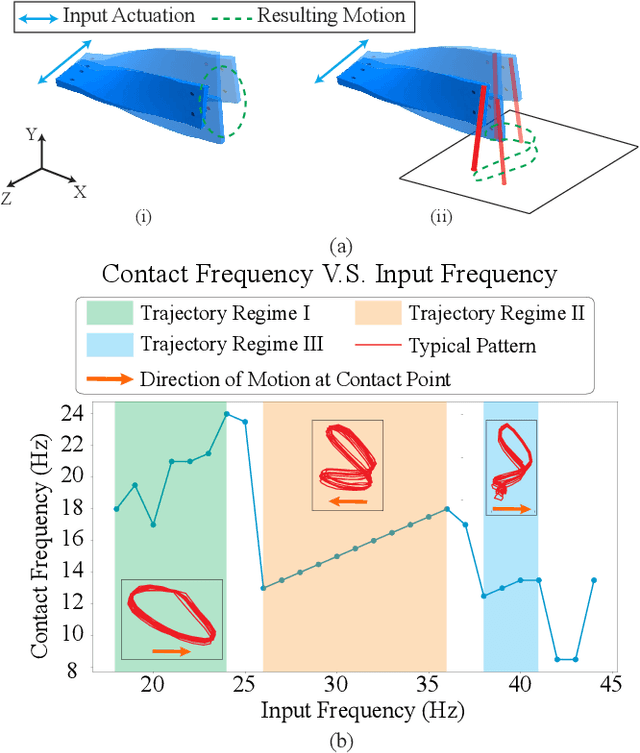
We propose a novel mechanism that propagates vibration through soft twisted beams, taking advantage of dynamically-coupled anisotropic stiffness to simplify the actuation of walking robots. Using dynamic simulation and experimental approaches, we show that the coupled stiffness of twisted beams with terrain contact can be controlled to generate a variety of complex trajectories by changing the frequency of the input signal. This work reveals how ground contact influences the system's dynamic behavior, supporting the design of walking robots inspired by this phenomenon. We also show that the proposed twisted beam produces a tunable walking gait from a single vibrational input.
* 8 pages, 5 figure, this paper has been submitted to IEEE Robotics and
Automation Letters, copyright may be transferred without notice, after which
this version may no longer be accessible, the supplemental video is available
at: https://youtu.be/HpvOvaIC1Z4
View paper on