 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
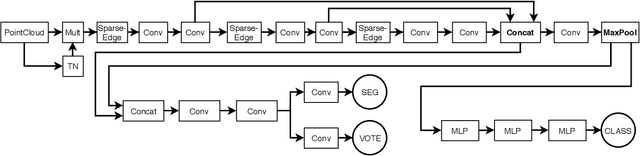
Add to EdgeArrowPose: Segmentation, Detection, and 5 DoF Pose Estimation Network for Colorless Point Clouds
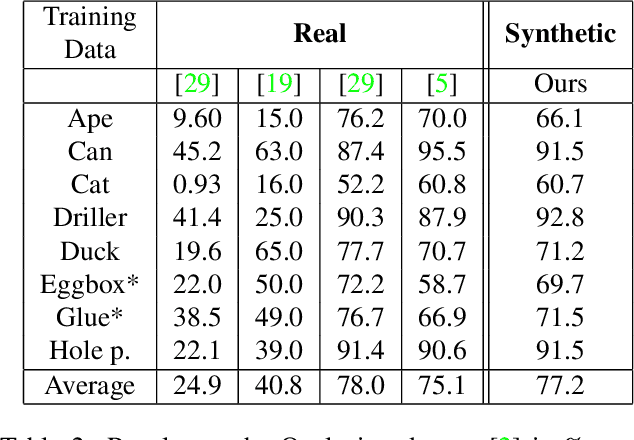
Jun 10, 2025This paper presents a fast detection and 5 DoF (Degrees of Freedom) pose estimation network for colorless point clouds. The pose estimation is calculated from center and top points of the object, predicted by the neural network. The network is trained on synthetic data, and tested on a benchmark dataset, where it demonstrates state-of-the-art performance and outperforms all colorless methods. The network is able to run inference in only 250 milliseconds making it usable in many scenarios. Project page with code at arrowpose.github.io
In-Hand Pose Estimation and Pin Inspection for Insertion of Through-Hole Components
Aug 02, 2022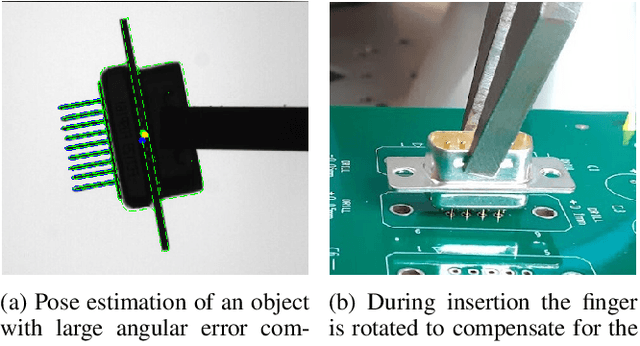
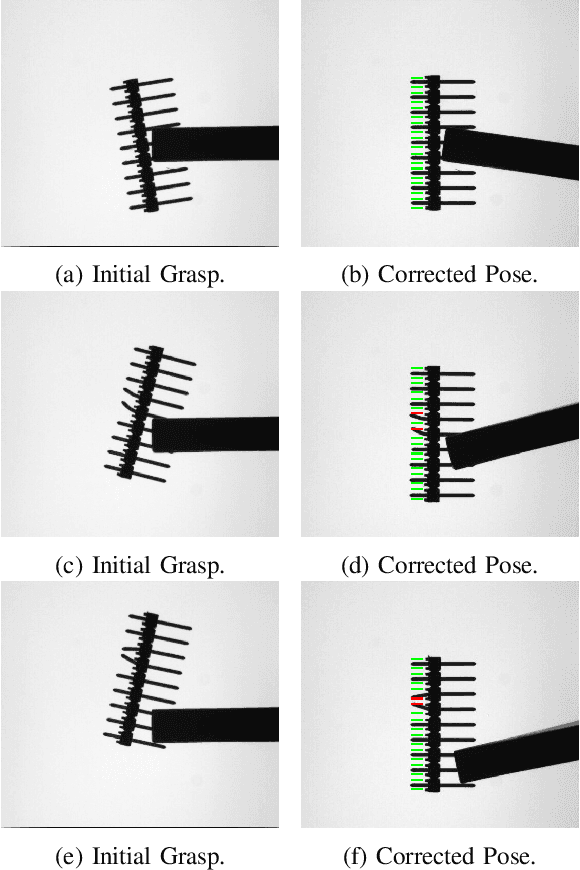
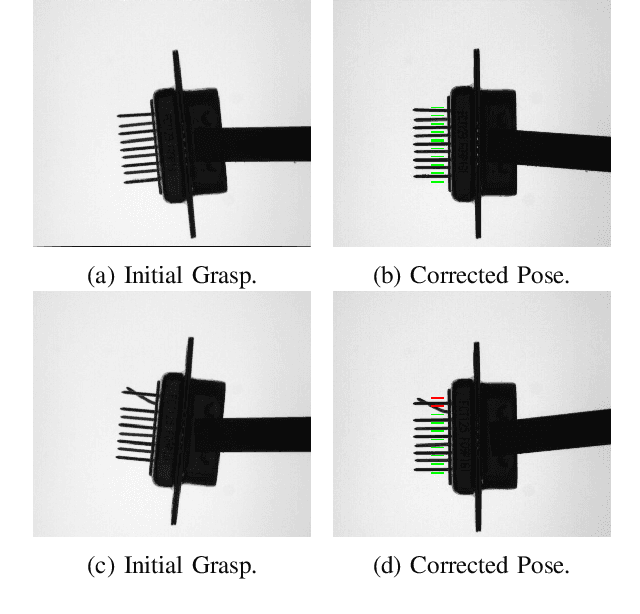
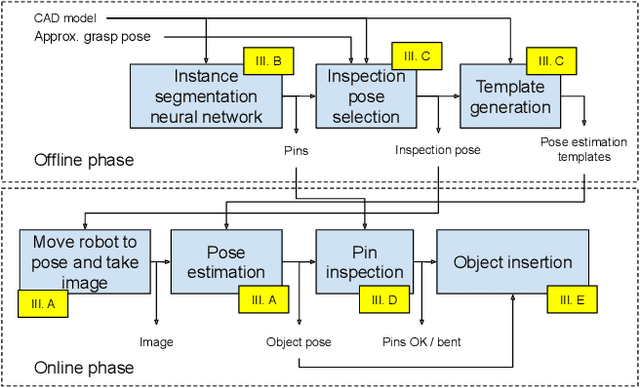
The insertion of through-hole components is a difficult task. As the tolerances of the holes are very small, minor errors in the insertion will result in failures. These failures can damage components and will require manual intervention for recovery. Errors can occur both from imprecise object grasps and bent pins. Therefore, it is important that a system can accurately determine the object's position and reject components with bent pins. By utilizing the constraints inherent in the object grasp a method using template matching is able to obtain very precise pose estimates. Methods for pin-checking are also implemented, compared, and a successful method is shown. The set-up is performed automatically, with two novel contributions. A deep learning segmentation of the pins is performed and the inspection pose is found by simulation. From the inspection pose and the segmented pins, the templates for pose estimation and pin check are then generated. To train the deep learning method a dataset of segmented through-hole components is created. The network shows a 97.3 % accuracy on the test set. The pin-segmentation network is also tested on the insertion CAD models and successfully segment the pins. The complete system is tested on three different objects, and experiments show that the system is able to insert all objects successfully. Both by correcting in-hand grasp errors and rejecting objects with bent pins.
ParaPose: Parameter and Domain Randomization Optimization for Pose Estimation using Synthetic Data
Mar 02, 2022
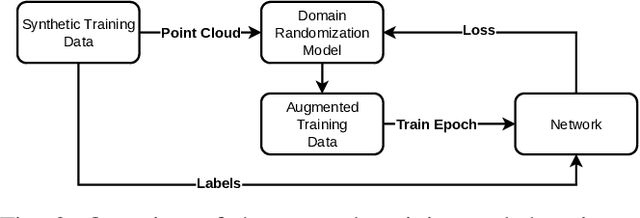
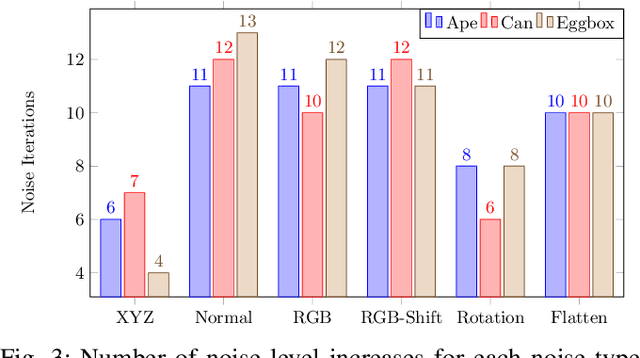
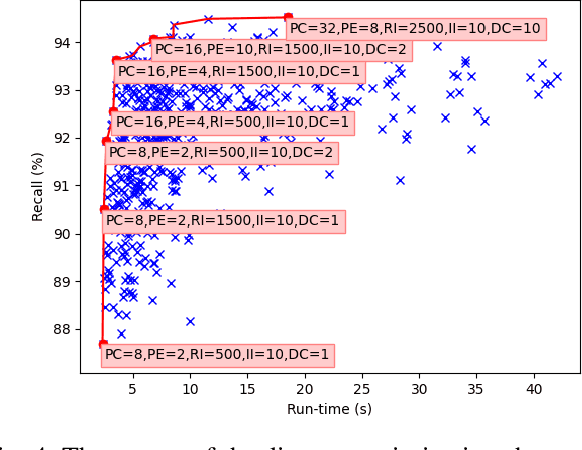
Pose estimation is the task of determining the 6D position of an object in a scene. Pose estimation aid the abilities and flexibility of robotic set-ups. However, the system must be configured towards the use case to perform adequately. This configuration is time-consuming and limits the usability of pose estimation and, thereby, robotic systems. Deep learning is a method to overcome this configuration procedure by learning parameters directly from the dataset. However, obtaining this training data can also be very time-consuming. The use of synthetic training data avoids this data collection problem, but a configuration of the training procedure is necessary to overcome the domain gap problem. Additionally, the pose estimation parameters also need to be configured. This configuration is jokingly known as grad student descent as parameters are manually adjusted until satisfactory results are obtained. This paper presents a method for automatic configuration using only synthetic data. This is accomplished by learning the domain randomization during network training, and then using the domain randomization to optimize the pose estimation parameters. The developed approach shows state-of-the-art performance of 82.0 % recall on the challenging OCCLUSION dataset, outperforming all previous methods with a large margin. These results prove the validity of automatic set-up of pose estimation using purely synthetic data.
Deep learning classification of large-scale point clouds: A case study on cuneiform tablets
Feb 22, 2022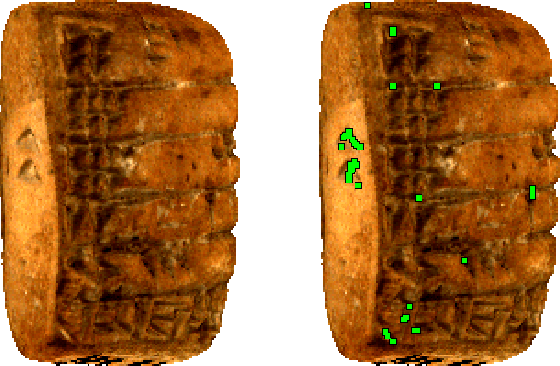



This paper introduces a novel network architecture for the classification of large-scale point clouds. The network is used to classify metadata from cuneiform tablets. As more than half a million tablets remain unprocessed, this can help create an overview of the tablets. The network is tested on a comparison dataset and obtains state-of-the-art performance. We also introduce new metadata classification tasks on which the network shows promising results. Finally, we introduce the novel Maximum Attention visualization, demonstrating that the trained network focuses on the intended features.
Bridging the Performance Gap Between Pose Estimation Networks Trained on Real And Synthetic Data Using Domain Randomization
Nov 17, 2020

Since the introduction of deep learning methods, pose estimation performance has increased drastically. Usually, large amounts of manually annotated training data are required for these networks to perform. While training on synthetic data can avoid the manual annotation, this introduces another obstacle. There is currently a large performance gap between methods trained on real and synthetic data. This paper introduces a new method, which bridges the gap between real and synthetically trained networks. As opposed to other methods, the network utilizes 3D point clouds. This allows both for domain randomization in 3D and to use neighboring geometric information during inference. Experiments on three large pose estimation benchmarks show that the presented method outperforms previous methods trained on synthetic data and achieves comparable-and sometimes superior-results to existing methods trained on real data.