 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Active Learning for Censored Regression
Feb 19, 2024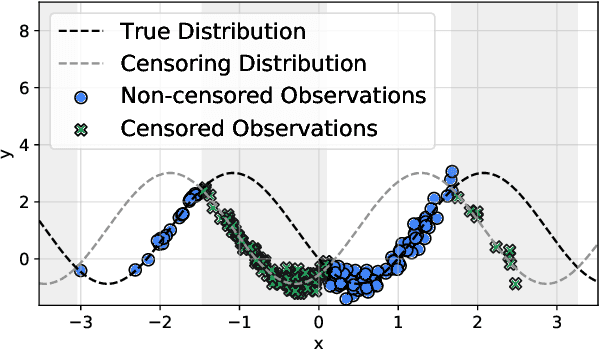

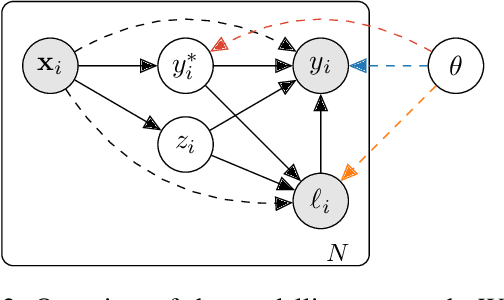

Bayesian active learning is based on information theoretical approaches that focus on maximising the information that new observations provide to the model parameters. This is commonly done by maximising the Bayesian Active Learning by Disagreement (BALD) acquisitions function. However, we highlight that it is challenging to estimate BALD when the new data points are subject to censorship, where only clipped values of the targets are observed. To address this, we derive the entropy and the mutual information for censored distributions and derive the BALD objective for active learning in censored regression ($\mathcal{C}$-BALD). We propose a novel modelling approach to estimate the $\mathcal{C}$-BALD objective and use it for active learning in the censored setting. Across a wide range of datasets and models, we demonstrate that $\mathcal{C}$-BALD outperforms other Bayesian active learning methods in censored regression.
Deep Evidential Learning for Bayesian Quantile Regression
Aug 21, 2023It is desirable to have accurate uncertainty estimation from a single deterministic forward-pass model, as traditional methods for uncertainty quantification are computationally expensive. However, this is difficult because single forward-pass models do not sample weights during inference and often make assumptions about the target distribution, such as assuming it is Gaussian. This can be restrictive in regression tasks, where the mean and standard deviation are inadequate to model the target distribution accurately. This paper proposes a deep Bayesian quantile regression model that can estimate the quantiles of a continuous target distribution without the Gaussian assumption. The proposed method is based on evidential learning, which allows the model to capture aleatoric and epistemic uncertainty with a single deterministic forward-pass model. This makes the method efficient and scalable to large models and datasets. We demonstrate that the proposed method achieves calibrated uncertainties on non-Gaussian distributions, disentanglement of aleatoric and epistemic uncertainty, and robustness to out-of-distribution samples.
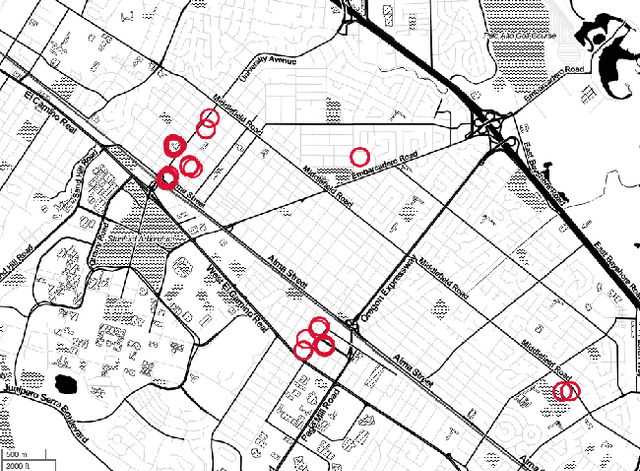
Mind the Gap -- Modelling Difference Between Censored and Uncensored Electric Vehicle Charging Demand
Jan 24, 2023Electric vehicle charging demand models, with charging records as input, will inherently be biased toward the supply of available chargers, as the data do not include demand lost from occupied stations and competitors. This lost demand implies that the records only observe a fraction of the total demand, i.e. the observations are censored, and actual demand is likely higher than what the data reflect. Machine learning models often neglect to account for this censored demand when forecasting the charging demand, which limits models' applications for future expansions and supply management. We address this gap by modelling the charging demand with probabilistic censorship-aware graph neural networks, which learn the latent demand distribution in both the spatial and temporal dimensions. We use GPS trajectories from cars in Copenhagen, Denmark, to study how censoring occurs and much demand is lost due to occupied charging and competing services. We find that censorship varies throughout the city and over time, encouraging spatial and temporal modelling. We find that in some regions of Copenhagen, censorship occurs 61% of the time. Our results show censorship-aware models provide better prediction and uncertainty estimation in actual future demand than censorship-unaware models. Our results suggest that future models based on charging records should account for the censoring to expand the application areas of machine learning models in this supply management and infrastructure expansion.
Bayesian Active Learning with Fully Bayesian Gaussian Processes
May 20, 2022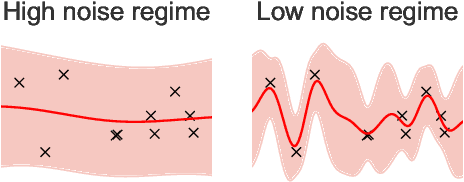
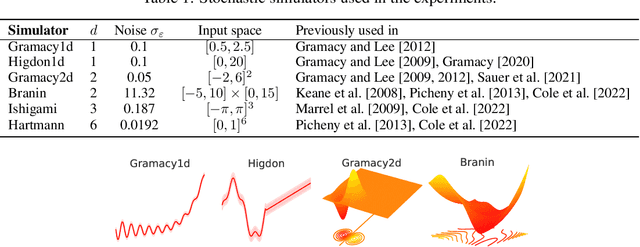
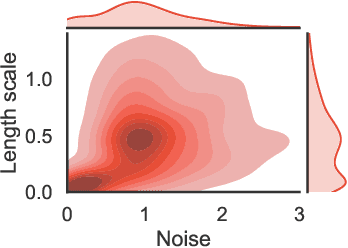
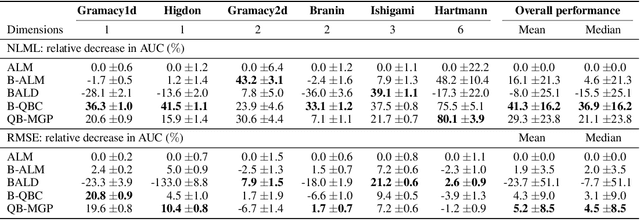
The bias-variance trade-off is a well-known problem in machine learning that only gets more pronounced the less available data there is. In active learning, where labeled data is scarce or difficult to obtain, neglecting this trade-off can cause inefficient and non-optimal querying, leading to unnecessary data labeling. In this paper, we focus on active learning with Gaussian Processes (GPs). For the GP, the bias-variance trade-off is made by optimization of the two hyperparameters: the length scale and noise-term. Considering that the optimal mode of the joint posterior of the hyperparameters is equivalent to the optimal bias-variance trade-off, we approximate this joint posterior and utilize it to design two new acquisition functions. The first one is a Bayesian variant of Query-by-Committee (B-QBC), and the second is an extension that explicitly minimizes the predictive variance through a Query by Mixture of Gaussian Processes (QB-MGP) formulation. Across six common simulators, we empirically show that B-QBC, on average, achieves the best marginal likelihood, whereas QB-MGP achieves the best predictive performance. We show that incorporating the bias-variance trade-off in the acquisition functions mitigates unnecessary and expensive data labeling.
Deep Spatio-Temporal Forecasting of Electrical Vehicle Charging Demand
Jun 21, 2021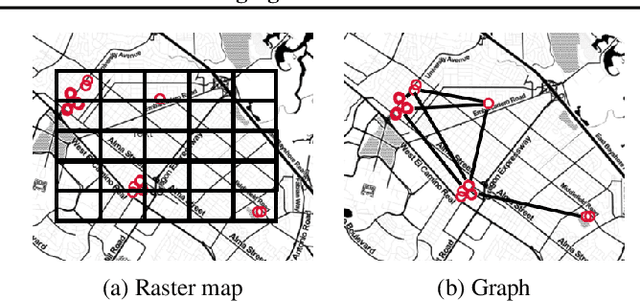
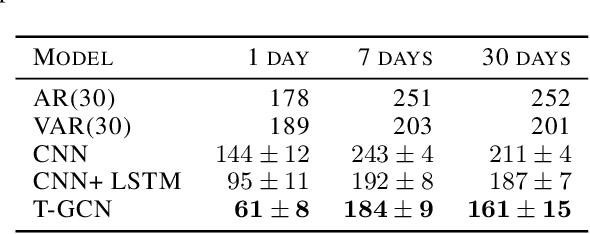
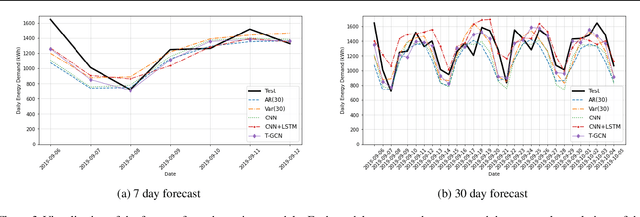
Electric vehicles can offer a low carbon emission solution to reverse rising emission trends. However, this requires that the energy used to meet the demand is green. To meet this requirement, accurate forecasting of the charging demand is vital. Short and long-term charging demand forecasting will allow for better optimisation of the power grid and future infrastructure expansions. In this paper, we propose to use publicly available data to forecast the electric vehicle charging demand. To model the complex spatial-temporal correlations between charging stations, we argue that Temporal Graph Convolution Models are the most suitable to capture the correlations. The proposed Temporal Graph Convolutional Networks provide the most accurate forecasts for short and long-term forecasting compared with other forecasting methods.