 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarial construction as a potential solution to the experiment design problem in large task spaces
Feb 03, 2026Despite decades of work, we still lack a robust, task-general theory of human behavior even in the simplest domains. In this paper we tackle the generality problem head-on, by aiming to develop a unified model for all tasks embedded in a task-space. In particular we consider the space of binary sequence prediction tasks where the observations are generated by the space parameterized by hidden Markov models (HMM). As the space of tasks is large, experimental exploration of the entire space is infeasible. To solve this problem we propose the adversarial construction approach, which helps identify tasks that are most likely to elicit a qualitatively novel behavior. Our results suggest that adversarial construction significantly outperforms random sampling of environments and therefore could be used as a proxy for optimal experimental design in high-dimensional task spaces.
Exploring the hierarchical structure of human plans via program generation
Nov 30, 2023Human behavior is inherently hierarchical, resulting from the decomposition of a task into subtasks or an abstract action into concrete actions. However, behavior is typically measured as a sequence of actions, which makes it difficult to infer its hierarchical structure. In this paper, we explore how people form hierarchically-structured plans, using an experimental paradigm that makes hierarchical representations observable: participants create programs that produce sequences of actions in a language with explicit hierarchical structure. This task lets us test two well-established principles of human behavior: utility maximization (i.e. using fewer actions) and minimum description length (MDL; i.e. having a shorter program). We find that humans are sensitive to both metrics, but that both accounts fail to predict a qualitative feature of human-created programs, namely that people prefer programs with reuse over and above the predictions of MDL. We formalize this preference for reuse by extending the MDL account into a generative model over programs, modeling hierarchy choice as the induction of a grammar over actions. Our account can explain the preference for reuse and provides the best prediction of human behavior, going beyond simple accounts of compressibility to highlight a principle that guides hierarchical planning.
Humans decompose tasks by trading off utility and computational cost
Nov 07, 2022



Human behavior emerges from planning over elaborate decompositions of tasks into goals, subgoals, and low-level actions. How are these decompositions created and used? Here, we propose and evaluate a normative framework for task decomposition based on the simple idea that people decompose tasks to reduce the overall cost of planning while maintaining task performance. Analyzing 11,117 distinct graph-structured planning tasks, we find that our framework justifies several existing heuristics for task decomposition and makes predictions that can be distinguished from two alternative normative accounts. We report a behavioral study of task decomposition ($N=806$) that uses 30 randomly sampled graphs, a larger and more diverse set than that of any previous behavioral study on this topic. We find that human responses are more consistent with our framework for task decomposition than alternative normative accounts and are most consistent with a heuristic -- betweenness centrality -- that is justified by our approach. Taken together, our results provide new theoretical insight into the computational principles underlying the intelligent structuring of goal-directed behavior.
Learning to select computations
Aug 07, 2018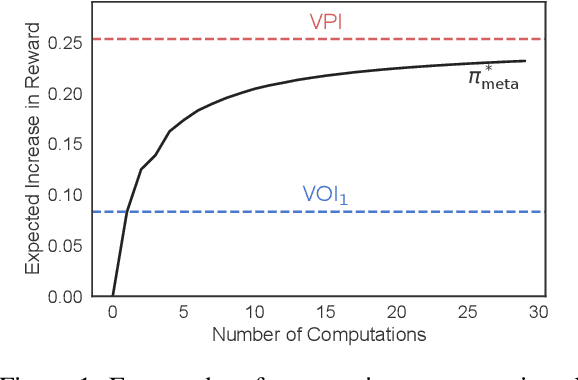
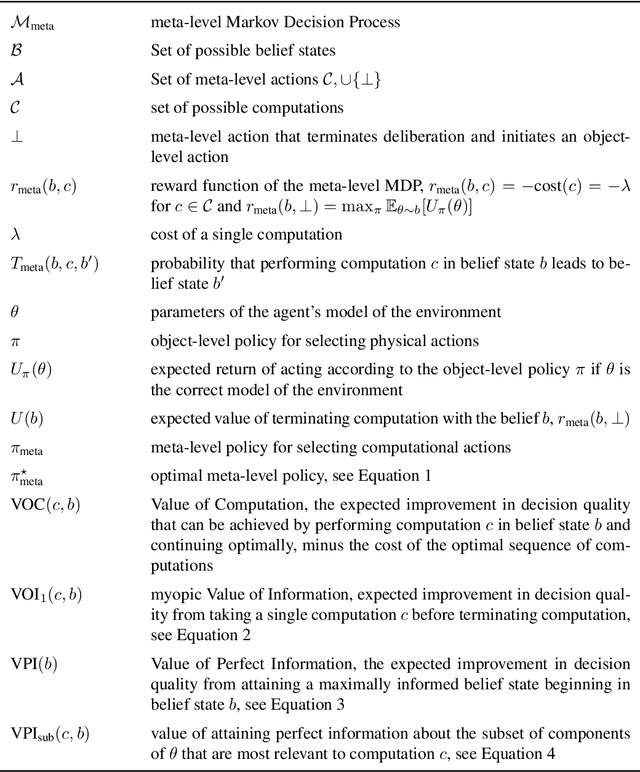
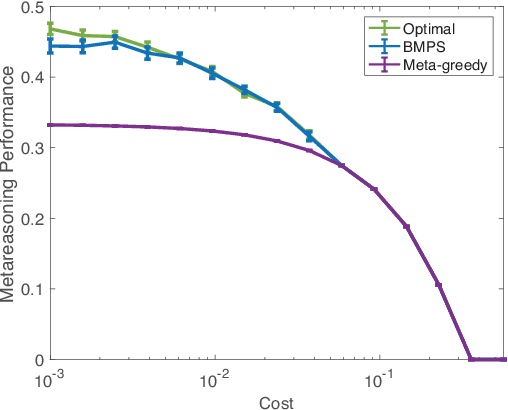
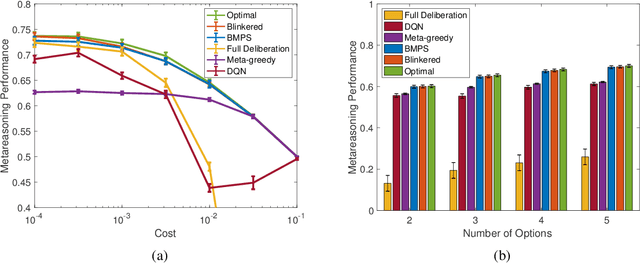
The efficient use of limited computational resources is an essential ingredient of intelligence. Selecting computations optimally according to rational metareasoning would achieve this, but this is computationally intractable. Inspired by psychology and neuroscience, we propose the first concrete and domain-general learning algorithm for approximating the optimal selection of computations: Bayesian metalevel policy search (BMPS). We derive this general, sample-efficient search algorithm for a computation-selecting metalevel policy based on the insight that the value of information lies between the myopic value of information and the value of perfect information. We evaluate BMPS on three increasingly difficult metareasoning problems: when to terminate computation, how to allocate computation between competing options, and planning. Across all three domains, BMPS achieved near-optimal performance and compared favorably to previously proposed metareasoning heuristics. Finally, we demonstrate the practical utility of BMPS in an emergency management scenario, even accounting for the overhead of metareasoning.