 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Non-contact Muscle Activity Estimation using FMCW Radar
Dec 21, 2023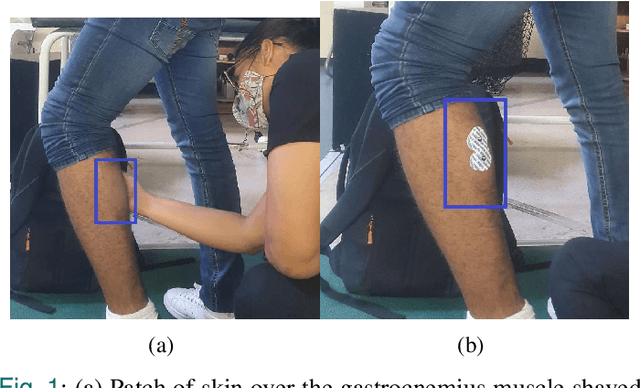
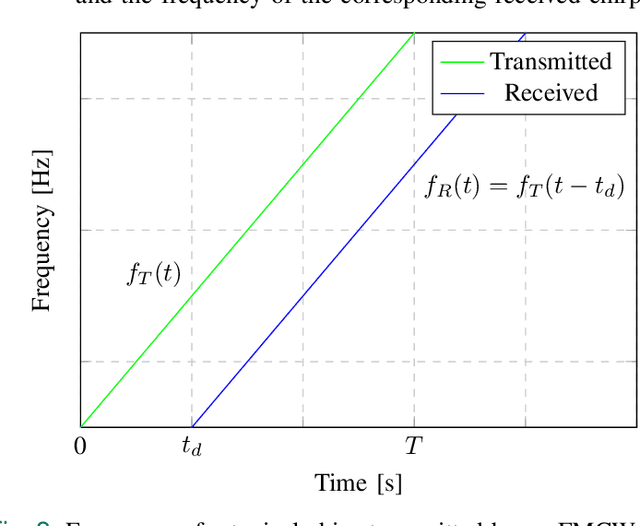
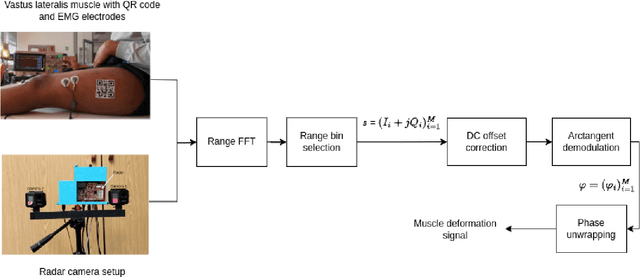
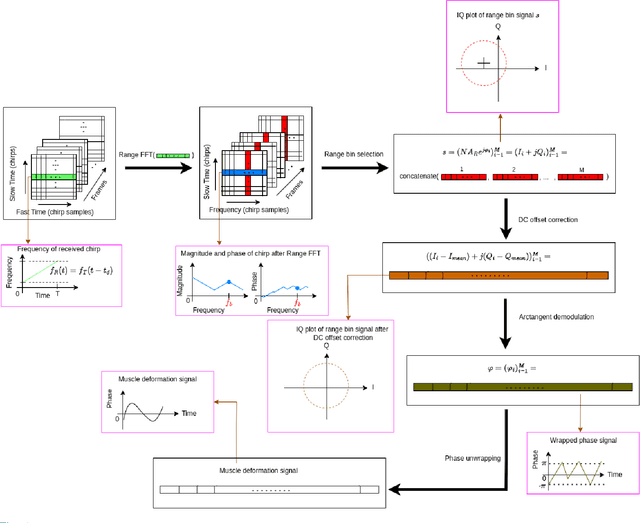
Surface electromyography (sEMG) is a widely used muscle activity monitoring technique. sEMG measures muscle activity through monopolar and bipolar, multi-electrode electrodes. The surface electrodes are placed on the surface of the skin above the target muscle and the received signal can be used to infer the state of the muscle - active, inactive or fatigued - which serves as vital information during neurological and orthopaedic rehabilitation. Additionally, the sEMG signal can also be used for the control of prostheses. sEMG requires contact with the participant's skin and is thus a potentially uncomfortable method for the measurement of muscle activity. Moreover, the setup procedure has been termed time-consuming by sEMG experts and is listed as one of the main barriers to the clinical employment of the technique. Previous studies have shown that architectural changes, particularly muscle deformation, can provide information about the activity of the muscle, providing an alternative to sEMG. In all these studies, the muscle deformation signal is acquired using ultrasound imaging, an approach known as sonomyography (SMG). Despite its advantages, such as improved spatial resolution, SMG is still a contact based approach. In this paper, we propose a non-contact muscle activity monitoring approach that measures the muscle deformation signal using a Frequency Modulated Continuous Wave (FMCW) mmWave radar which we call radiomyography (RMG). In future, this system will enable muscle activation to be measured in an unconstrained and less cumbersome manner for both the person conducting the test and the individual being tested.
Wild Motion Unleashed: Markerless 3D Kinematics and Force Estimation in Cheetahs
Dec 10, 2023The complex dynamics of animal manoeuvrability in the wild is extremely challenging to study. The cheetah ($\textit{Acinonyx jubatus}$) is a perfect example: despite great interest in its unmatched speed and manoeuvrability, obtaining complete whole-body motion data from these animals remains an unsolved problem. This is especially difficult in wild cheetahs, where it is essential that the methods used are remote and do not constrain the animal's motion. In this work, we use data obtained from cheetahs in the wild to present a trajectory optimisation approach for estimating the 3D kinematics and joint torques of subjects remotely. We call this approach kinetic full trajectory estimation (K-FTE). We validate the method on a dataset comprising synchronised video and force plate data. We are able to reconstruct the 3D kinematics with an average reprojection error of 17.69 pixels (62.94 $\%$ PCK using the nose-to-eye(s) length segment as a threshold), while the estimates produce an average root-mean-square error of 171.3 N ($\approx$ 17.16 $\%$ of peak force during stride) for the estimated ground reaction force when compared against the force plate data. While the joint torques cannot be directly validated against ground truth data, as no such data is available for cheetahs, the estimated torques agree with previous studies of quadrupeds in controlled settings. These results will enable deeper insight into the study of animal locomotion in a more natural environment for both biologists and roboticists.
AcinoSet: A 3D Pose Estimation Dataset and Baseline Models for Cheetahs in the Wild
Mar 24, 2021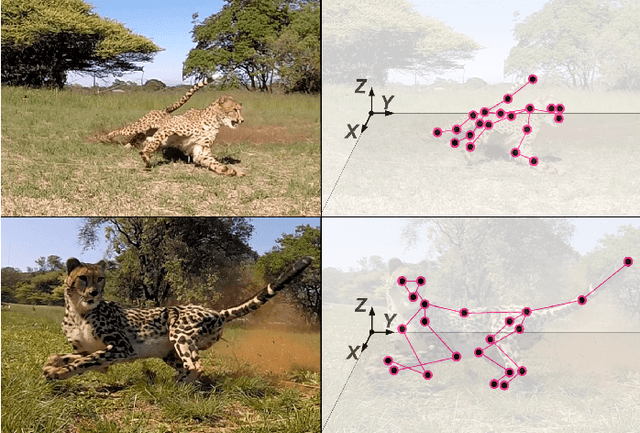
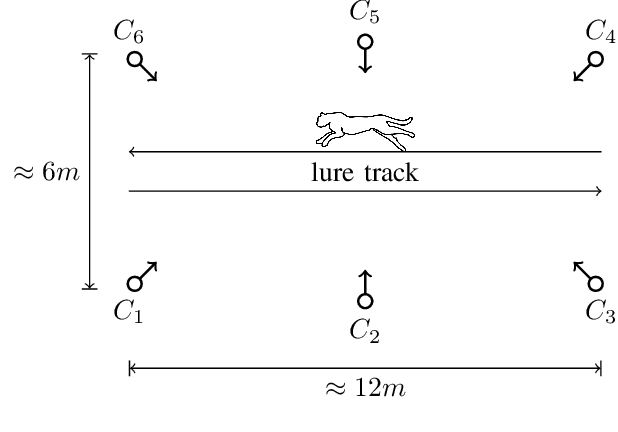
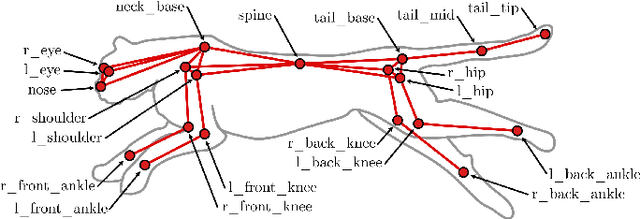
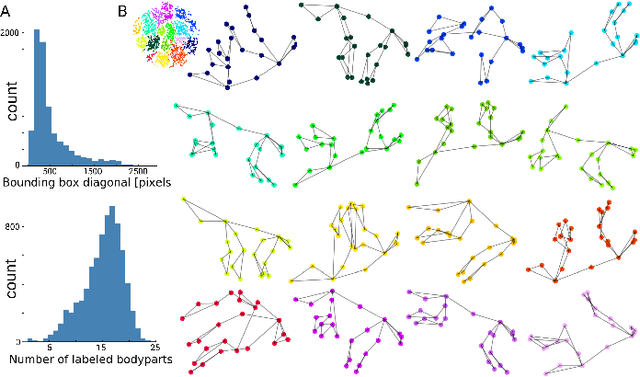
Animals are capable of extreme agility, yet understanding their complex dynamics, which have ecological, biomechanical and evolutionary implications, remains challenging. Being able to study this incredible agility will be critical for the development of next-generation autonomous legged robots. In particular, the cheetah (acinonyx jubatus) is supremely fast and maneuverable, yet quantifying its whole-body 3D kinematic data during locomotion in the wild remains a challenge, even with new deep learning-based methods. In this work we present an extensive dataset of free-running cheetahs in the wild, called AcinoSet, that contains 119,490 frames of multi-view synchronized high-speed video footage, camera calibration files and 7,588 human-annotated frames. We utilize markerless animal pose estimation to provide 2D keypoints. Then, we use three methods that serve as strong baselines for 3D pose estimation tool development: traditional sparse bundle adjustment, an Extended Kalman Filter, and a trajectory optimization-based method we call Full Trajectory Estimation. The resulting 3D trajectories, human-checked 3D ground truth, and an interactive tool to inspect the data is also provided. We believe this dataset will be useful for a diverse range of fields such as ecology, neuroscience, robotics, biomechanics as well as computer vision.