 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring Navigation Maps for Learning-Based Motion Prediction
Feb 13, 2023The prediction of surrounding agents' motion is a key for safe autonomous driving. In this paper, we explore navigation maps as an alternative to the predominant High Definition (HD) maps for learning-based motion prediction. Navigation maps provide topological and geometrical information on road-level, HD maps additionally have centimeter-accurate lane-level information. As a result, HD maps are costly and time-consuming to obtain, while navigation maps with near-global coverage are freely available. We describe an approach to integrate navigation maps into learning-based motion prediction models. To exploit locally available HD maps during training, we additionally propose a model-agnostic method for knowledge distillation. In experiments on the publicly available Argoverse dataset with navigation maps obtained from OpenStreetMap, our approach shows a significant improvement over not using a map at all. Combined with our method for knowledge distillation, we achieve results that are close to the original HD map-reliant models. Our publicly available navigation map API for Argoverse enables researchers to develop and evaluate their own approaches using navigation maps.
CRAT-Pred: Vehicle Trajectory Prediction with Crystal Graph Convolutional Neural Networks and Multi-Head Self-Attention
Feb 10, 2022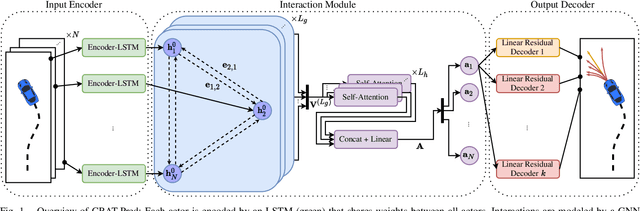
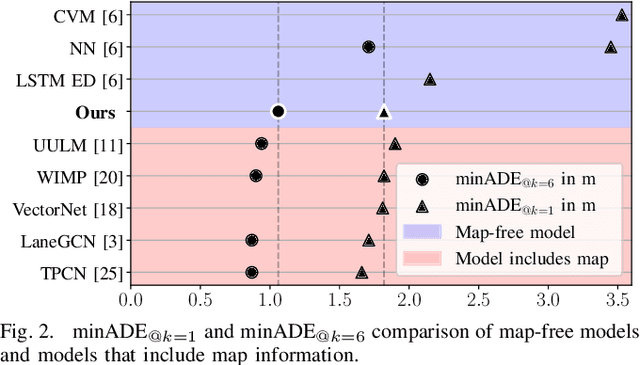
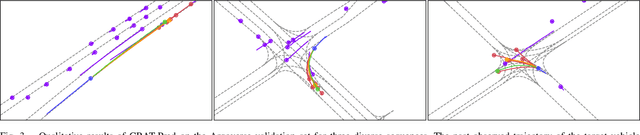
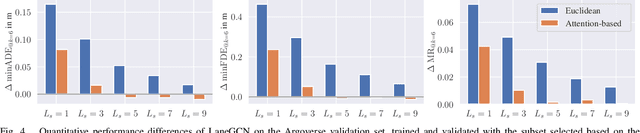
Predicting the motion of surrounding vehicles is essential for autonomous vehicles, as it governs their own motion plan. Current state-of-the-art vehicle prediction models heavily rely on map information. In reality, however, this information is not always available. We therefore propose CRAT-Pred, a multi-modal and non-rasterization-based trajectory prediction model, specifically designed to effectively model social interactions between vehicles, without relying on map information. CRAT-Pred applies a graph convolution method originating from the field of material science to vehicle prediction, allowing to efficiently leverage edge features, and combines it with multi-head self-attention. Compared to other map-free approaches, the model achieves state-of-the-art performance with a significantly lower number of model parameters. In addition to that, we quantitatively show that the self-attention mechanism is able to learn social interactions between vehicles, with the weights representing a measurable interaction score. The source code is publicly available.
Rapid Exact Signal Scanning with Deep Convolutional Neural Networks
Aug 02, 2017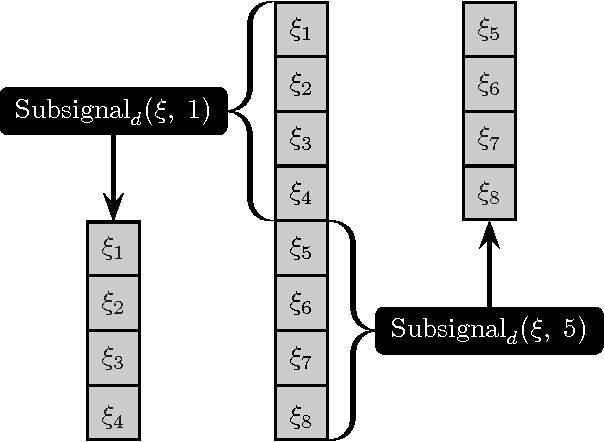
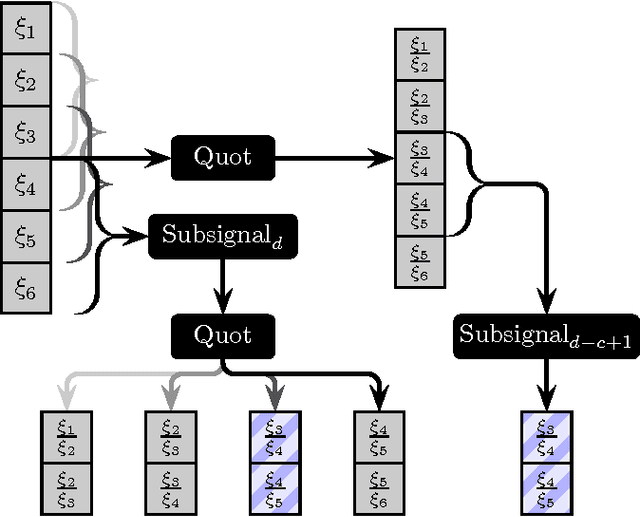
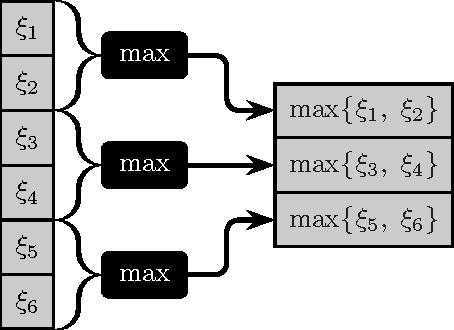
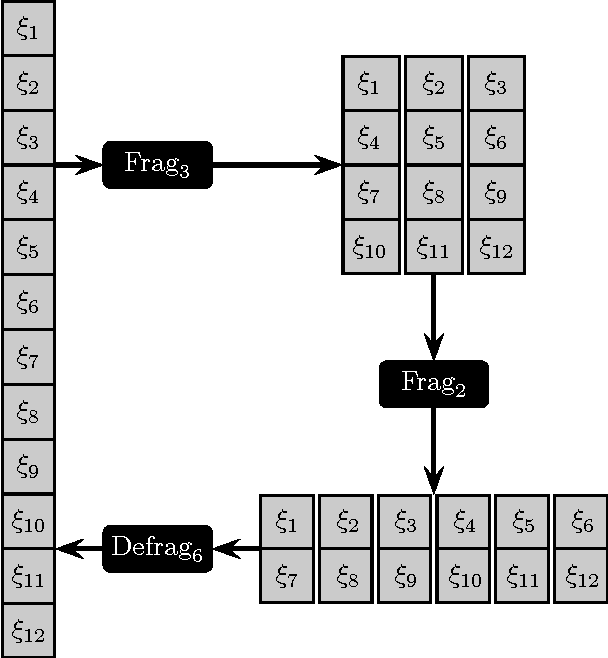
A rigorous formulation of the dynamics of a signal processing scheme aimed at dense signal scanning without any loss in accuracy is introduced and analyzed. Related methods proposed in the recent past lack a satisfactory analysis of whether they actually fulfill any exactness constraints. This is improved through an exact characterization of the requirements for a sound sliding window approach. The tools developed in this paper are especially beneficial if Convolutional Neural Networks are employed, but can also be used as a more general framework to validate related approaches to signal scanning. The proposed theory helps to eliminate redundant computations and renders special case treatment unnecessary, resulting in a dramatic boost in efficiency particularly on massively parallel processors. This is demonstrated both theoretically in a computational complexity analysis and empirically on modern parallel processors.
* Pages 1-16 only: Copyright (c) 2016 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission