 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSashimi-Bot: Autonomous Tri-manual Advanced Manipulation and Cutting of Deformable Objects
Nov 14, 2025Advanced robotic manipulation of deformable, volumetric objects remains one of the greatest challenges due to their pliancy, frailness, variability, and uncertainties during interaction. Motivated by these challenges, this article introduces Sashimi-Bot, an autonomous multi-robotic system for advanced manipulation and cutting, specifically the preparation of sashimi. The objects that we manipulate, salmon loins, are natural in origin and vary in size and shape, they are limp and deformable with poorly characterized elastoplastic parameters, while also being slippery and hard to hold. The three robots straighten the loin; grasp and hold the knife; cut with the knife in a slicing motion while cooperatively stabilizing the loin during cutting; and pick up the thin slices from the cutting board or knife blade. Our system combines deep reinforcement learning with in-hand tool shape manipulation, in-hand tool cutting, and feedback of visual and tactile information to achieve robustness to the variabilities inherent in this task. This work represents a milestone in robotic manipulation of deformable, volumetric objects that may inspire and enable a wide range of other real-world applications.
Visual Servoing from Deep Neural Networks
Jun 07, 2017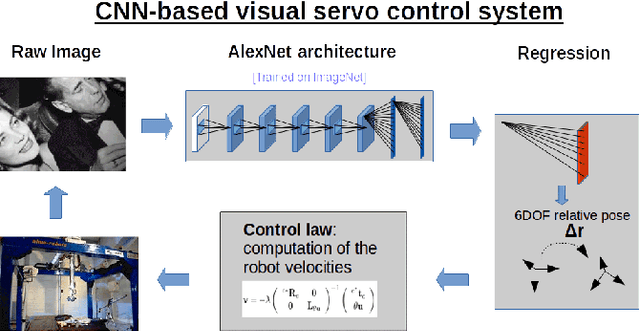
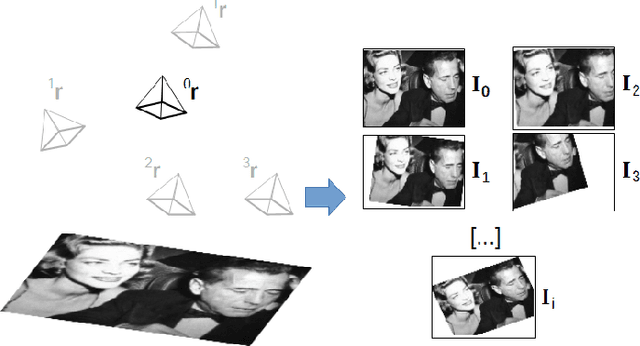
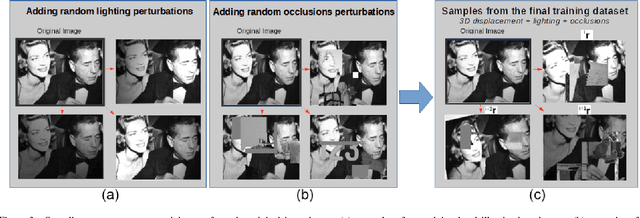
We present a deep neural network-based method to perform high-precision, robust and real-time 6 DOF visual servoing. The paper describes how to create a dataset simulating various perturbations (occlusions and lighting conditions) from a single real-world image of the scene. A convolutional neural network is fine-tuned using this dataset to estimate the relative pose between two images of the same scene. The output of the network is then employed in a visual servoing control scheme. The method converges robustly even in difficult real-world settings with strong lighting variations and occlusions.A positioning error of less than one millimeter is obtained in experiments with a 6 DOF robot.