 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Reactive performance-based Shared Control Framework for Assistive Robotic Manipulators
Nov 06, 2023In Physical Human--Robot Interaction (pHRI) grippers, humans and robots may contribute simultaneously to actions, so it is necessary to determine how to combine their commands. Control may be swapped from one to the other within certain limits, or input commands may be combined according to some criteria. The Assist-As-Needed (AAN) paradigm focuses on this second approach, as the controller is expected to provide the minimum required assistance to users. Some AAN systems rely on predicting human intention to adjust actions. However, if prediction is too hard, reactive AAN systems may weigh input commands into an emergent one. This paper proposes a novel AAN reactive control system for a robot gripper where input commands are weighted by their respective local performances. Thus, rather than minimizing tracking errors or differences to expected velocities, humans receive more help depending on their needs. The system has been tested using a gripper attached to a sensitive robot arm, which provides evaluation parameters. Tests consisted of completing an on-air planar path with both arms. After the robot gripped a person's forearm, the path and current position of the robot were displayed on a screen to provide feedback to the human. The proposed control has been compared to results without assistance and to impedance control for benchmarking. A statistical analysis of the results proves that global performance improved and tracking errors decreased for ten volunteers with the proposed controller. Besides, unlike impedance control, the proposed one does not significantly affect exerted forces, command variation, or disagreement, measured as the angular difference between human and output command. Results support that the proposed control scheme fits the AAN paradigm, although future work will require further tests for more complex environments and tasks.
Improving Standing Balance Performance through the Assistance of a Mobile Collaborative Robot
Sep 24, 2021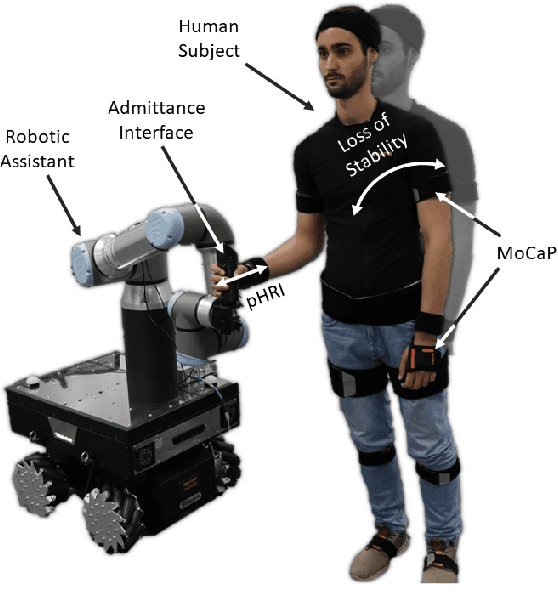
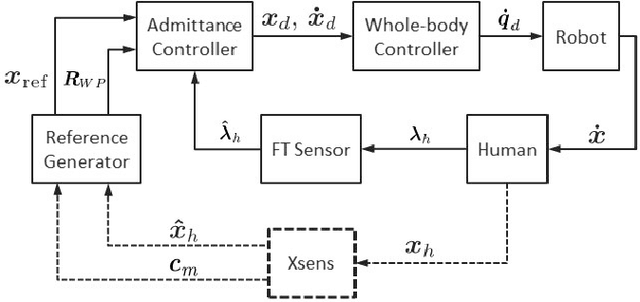
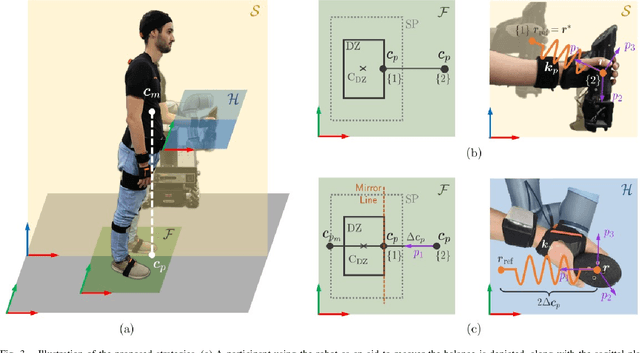
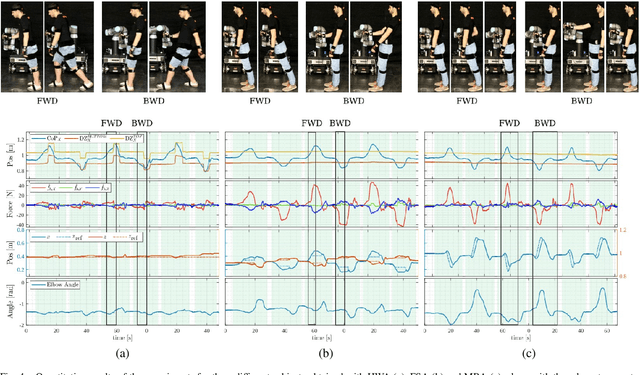
This letter presents the design and development of a robotic system to give physical assistance to the elderly or people with neurological disorders such as Ataxia or Parkinson's. In particular, we propose using a mobile collaborative robot with an interaction-assistive whole-body interface to help people unable to maintain balance. The robotic system consists of an Omni-directional mobile base, a high-payload robotic arm, and an admittance-type interface acting as a support handle while measuring human-sourced interaction forces. The postural balance of the human body is estimated through the projection of the body Center of Mass (CoM) to the support polygon (SP) representing the quasi-static Center of Pressure (CoP). In response to the interaction forces and the tracking of the human posture, the robot can create assistive forces to restore balance in case of its loss. Otherwise, during normal stance or walking, it will follow the user with minimum/no opposing forces through the generation of coupled arm and base movements. As the balance-restoring strategy, we propose two strategies and evaluate them in a laboratory setting on healthy human participants. Quantitative and qualitative results of a 12-subjects experiment are then illustrated and discussed, comparing the performances of the two strategies and the overall system.