 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombining Sampling- and Gradient-based Planning for Contact-rich Manipulation
Oct 07, 2023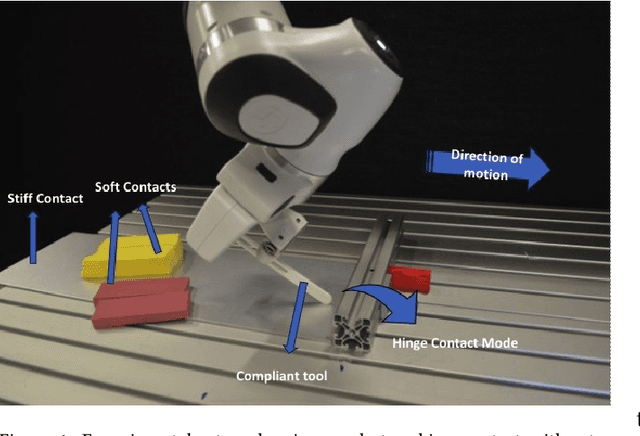
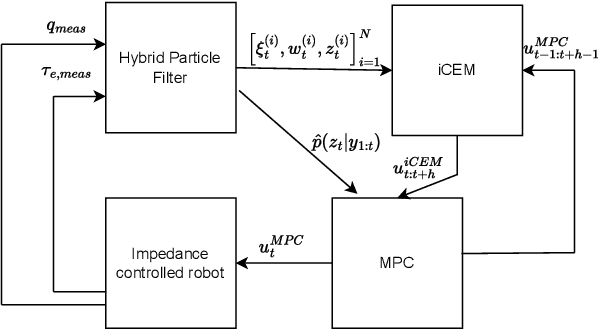
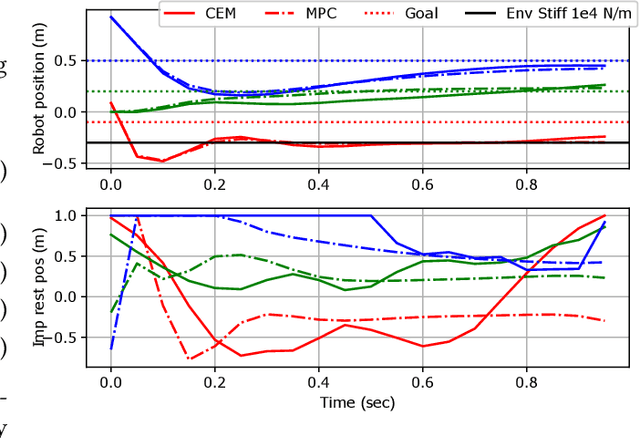
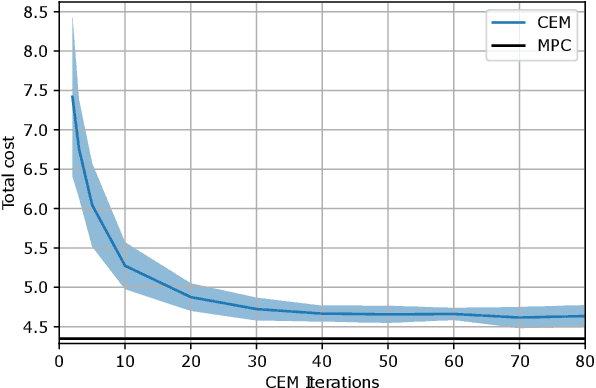
Planning over discontinuous dynamics is needed for robotics tasks like contact-rich manipulation, which presents challenges in the numerical stability and speed of planning methods when either neural network or analytical models are used. On the one hand, sampling-based planners require higher sample complexity in high-dimensional problems and cannot describe safety constraints such as force limits. On the other hand, gradient-based solvers can suffer from local optima and convergence issues when the Hessian is poorly conditioned. We propose a planning method with both sampling- and gradient-based elements, using the Cross-entropy Method to initialize a gradient-based solver, providing better search over local minima and the ability to handle explicit constraints. We show the approach allows smooth, stable contact-rich planning for an impedance-controlled robot making contact with a stiff environment, benchmarking against gradient-only MPC and CEM.
Teaching contact-rich tasks from visual demonstrations by constraint extraction
Apr 03, 2023


Contact-rich manipulation involves kinematic constraints on the task motion, typically with discrete transitions between these constraints during the task. Allowing the robot to detect and reason about these contact constraints can support robust and dynamic manipulation, but how can these contact models be efficiently learned? Purely visual observations are an attractive data source, allowing passive task demonstrations with unmodified objects. Existing approaches for vision-only learning from demonstration are effective in pick-and-place applications and planar tasks. Nevertheless, accuracy/occlusions and unobserved task dynamics can limit their robustness in contact-rich manipulation. To use visual demonstrations for contact-rich robotic tasks, we consider the demonstration of pose trajectories with transitions between holonomic kinematic constraints, first clustering the trajectories into discrete contact modes, then fitting kinematic constraints per each mode. The fit constraints are then used to (i) detect contact online with force/torque measurements and (ii) plan the robot policy with respect to the active constraint. We demonstrate the approach with real experiments, on cabling and rake tasks, showing the approach gives robust manipulation through contact transitions.
Differentiable Environment Primitives for Contact State Estimation
Apr 03, 2023
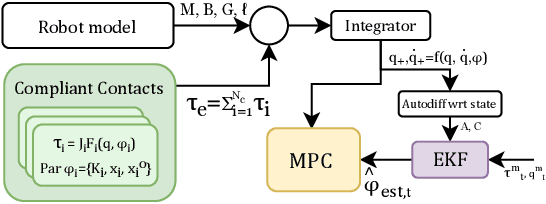
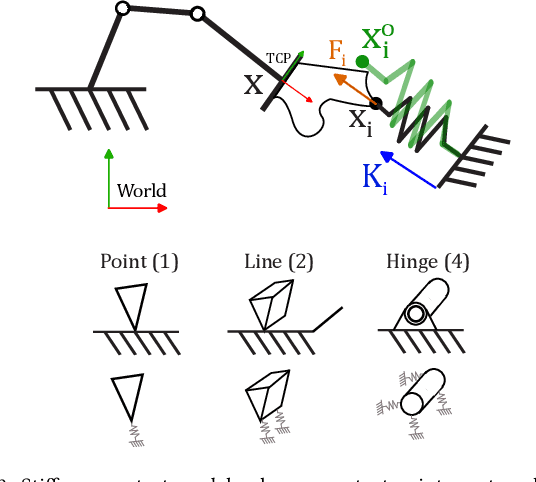
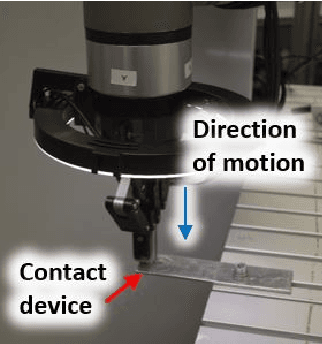
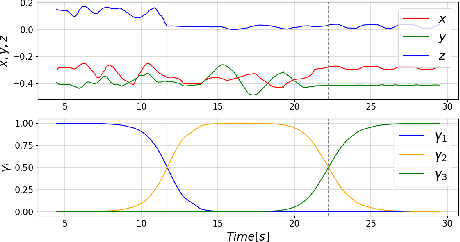
In contact-rich manipulation, the robot dynamics are coupled with an environment that has application-specific dynamic properties (stiffness, inertia) and geometry (contact normal). Knowledge of these environmental parameters can improve control and monitoring, but they are often unobserved and may vary, either online or between task instances. Observers, such as the extended Kalman filter, can be used to estimate these parameters, but such model-based techniques can require too much engineering work to scale up to complex environments, such as multi-point contact. To accelerate environment modeling, we propose environment primitives: parameterized environment dynamics that can be connected in parallel and are expressed in an automatic differentiation framework. This simplifies offline gradient-based optimization to fit model parameters and linearization of the coupled dynamics for an observer. This method is implemented for stiffness contact models, allowing the fitting of contact geometry and stiffness offline or their online estimation by an extended Kalman filter. This method is applied to a collaborative robot, estimating external force, contact stiffness, and contact geometry from the motor position and current. The estimates of external force and stiffness are compared with a momentum observer and direct force measurements.