 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Line-Based Room Segmentation and Continuous Euclidean Distance Fields
Feb 07, 2024Continuous maps representations, as opposed to traditional discrete ones such as grid maps, have been gaining traction in the research community. However, current approaches still suffer from high computation costs, making them unable to be used in large environments without sacrificing precision. In this paper, a scalable method building upon Gaussian Process-based Euclidean Distance Fields (GP-EDFs) is proposed. By leveraging structure inherent to indoor environments, namely walls and rooms, we achieve an accurate continuous map representation that is fast enough to be updated and used in real-time. This is possible thanks to a novel line-based room segmentation algorithm, enabling the creation of smaller local GP-EDFs for each room, which in turn also use line segments as its shape priors, thus representing the map more efficiently with fewer data points. We evaluate this method in simulation experiments, and make the code available open-source.
Risk-Aware Motion Planning in Partially Known Environments
Sep 23, 2021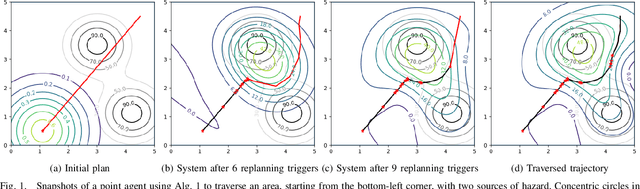
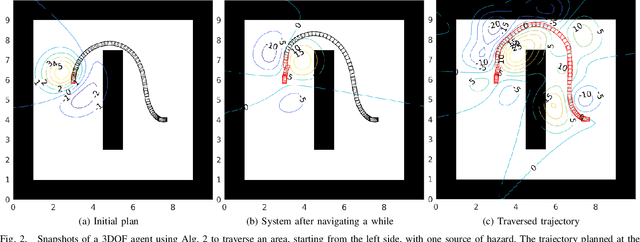
Recent trends envisage robots being deployed in areas deemed dangerous to humans, such as buildings with gas and radiation leaks. In such situations, the model of the underlying hazardous process might be unknown to the agent a priori, giving rise to the problem of planning for safe behaviour in partially known environments. We employ Gaussian process regression to create a probabilistic model of the hazardous process from local noisy samples. The result of this regression is then used by a risk metric, such as the Conditional Value-at-Risk, to reason about the safety at a certain state. The outcome is a risk function that can be employed in optimal motion planning problems. We demonstrate the use of the proposed function in two approaches. First is a sampling-based motion planning algorithm with an event-based trigger for online replanning. Second is an adaptation to the incremental Gaussian Process motion planner (iGPMP2), allowing it to quickly react and adapt to the environment. Both algorithms are evaluated in representative simulation scenarios, where they demonstrate the ability of avoiding high-risk areas.
Provably Safe Control of Lagrangian Systems in Obstacle-Scattered Environments
Sep 04, 2020



We propose a hybrid feedback control law that guarantees both safety and asymptotic stability for a class of Lagrangian systems in environments with obstacles. Rather than performing trajectory planning and implementing a trajectory-tracking feedback control law, our approach requires a sequence of locations in the environment (a path plan) and an abstraction of the obstacle-free space. The problem of following a path plan is then interpreted as a sequence of reach-avoid problems: the system is required to consecutively reach each location of the path plan while staying within safe regions. Obstacle-free ellipsoids are used as a way of defining such safe regions, each of which encloses two consecutive locations. Feasible Control Barrier Functions (CBFs) are created directly from geometric constraints, the ellipsoids, ensuring forward-invariance, and therefore safety. Reachability to each location is guaranteed by asymptotically stabilizing Control Lyapunov Functions (CLFs). Both CBFs and CLFs are then encoded into quadratic programs (QPs) without the need of relaxation variables. Furthermore, we also propose a switching mechanism that guarantees the control law is correct and well-defined even when transitioning between QPs. Simulations show the effectiveness of the proposed approach in two complex scenarios.