 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSampling Based Scene-Space Video Processing
Feb 05, 2021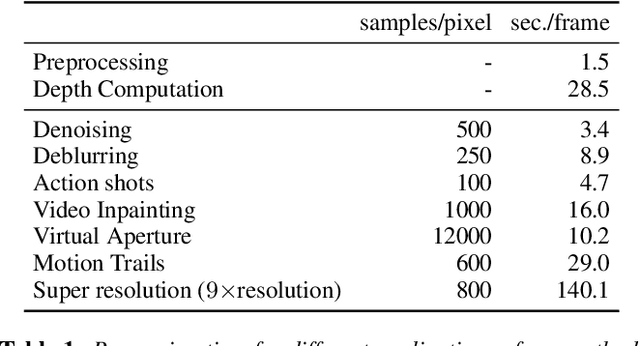
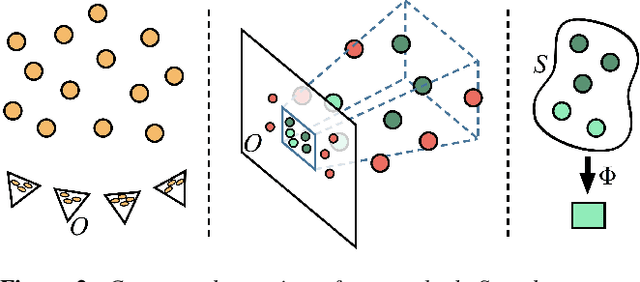
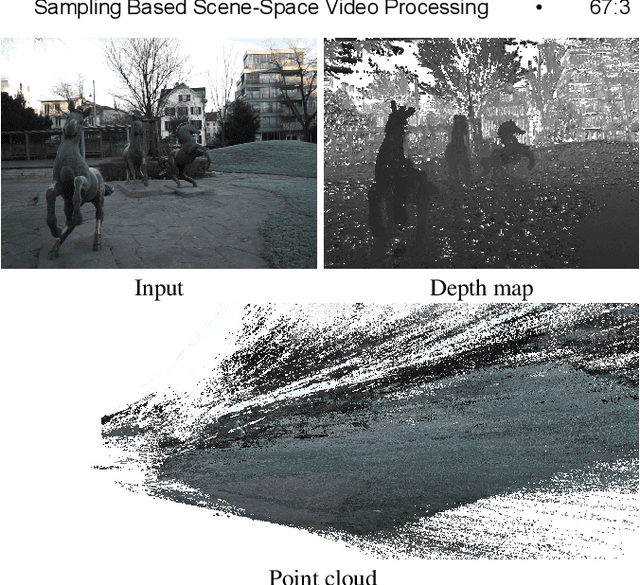
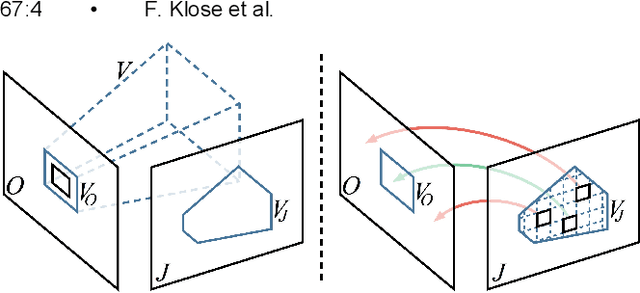
Many compelling video processing effects can be achieved if per-pixel depth information and 3D camera calibrations are known. However, the success of such methods is highly dependent on the accuracy of this "scene-space" information. We present a novel, sampling-based framework for processing video that enables high-quality scene-space video effects in the presence of inevitable errors in depth and camera pose estimation. Instead of trying to improve the explicit 3D scene representation, the key idea of our method is to exploit the high redundancy of approximate scene information that arises due to most scene points being visible multiple times across many frames of video. Based on this observation, we propose a novel pixel gathering and filtering approach. The gathering step is general and collects pixel samples in scene-space, while the filtering step is application-specific and computes a desired output video from the gathered sample sets. Our approach is easily parallelizable and has been implemented on GPU, allowing us to take full advantage of large volumes of video data and facilitating practical runtimes on HD video using a standard desktop computer. Our generic scene-space formulation is able to comprehensively describe a multitude of video processing applications such as denoising, deblurring, super resolution, object removal, computational shutter functions, and other scene-space camera effects. We present results for various casually captured, hand-held, moving, compressed, monocular videos depicting challenging scenes recorded in uncontrolled environments.
Caroline: An Autonomously Driving Vehicle for Urban Environments
Sep 22, 2014
The 2007 DARPA Urban Challenge afforded the golden opportunity for the Technische Universit\"at Braunschweig to demonstrate its abilities to develop an autonomously driving vehicle to compete with the world's best competitors. After several stages of qualification, our team CarOLO qualified early for the DARPA Urban Challenge Final Event and was among only eleven teams from initially 89 competitors to compete in the final. We had the ability to work together in a large group of experts, each contributing his expertise in his discipline, and significant organisational, financial and technical support by local sponsors who helped us to become the best non-US team. In this report, we describe the 2007 DARPA Urban Challenge, our contribution "Caroline", the technology and algorithms along with her performance in the DARPA Urban Challenge Final Event on November 3, 2007.
* 68 pages, 7 figures