 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePositional Bias in Multimodal Embedding Models: Do They Favor the Beginning, the Middle, or the End?
Nov 14, 2025Positional bias - where models overemphasize certain positions regardless of content - has been shown to negatively impact model performance across various tasks. While recent research has extensively examined positional bias in text generation models, its presence and effects in representation models remain underexplored. Even less is known about such biases in multimodal models. In this work, we investigate positional bias in multimodal representation models, specifically in the context of image-text retrieval. We begin by distinguishing between context importance and positional bias, and then assess the presence and extent of positional bias across different models and datasets. Our experiments demonstrate that positional bias is prevalent in multimodal models, but manifests differently across modalities: text encoders tend to exhibit bias toward the beginning of the input, whereas image encoders show bias at both the beginning and end. Furthermore, we find that this bias arises from, or is amplified by, a combination of factors, including the positional encoding scheme, training loss, context importance, and the nature of using image-text pairs in multimodal training.
FineLIP: Extending CLIP's Reach via Fine-Grained Alignment with Longer Text Inputs
Apr 02, 2025As a pioneering vision-language model, CLIP (Contrastive Language-Image Pre-training) has achieved significant success across various domains and a wide range of downstream vision-language tasks. However, the text encoders in popular CLIP models are limited to processing only 77 text tokens, which constrains their ability to effectively handle longer, detail-rich captions. Additionally, CLIP models often struggle to effectively capture detailed visual and textual information, which hampers their performance on tasks that require fine-grained analysis. To address these limitations, we present a novel approach, \textbf{FineLIP}, that extends the capabilities of CLIP. FineLIP enhances cross-modal text-image mapping by incorporating \textbf{Fine}-grained alignment with \textbf{L}onger text input within the CL\textbf{IP}-style framework. FineLIP first extends the positional embeddings to handle longer text, followed by the dynamic aggregation of local image and text tokens. The aggregated results are then used to enforce fine-grained token-to-token cross-modal alignment. We validate our model on datasets with long, detailed captions across two tasks: zero-shot cross-modal retrieval and text-to-image generation. Quantitative and qualitative experimental results demonstrate the effectiveness of FineLIP, outperforming existing state-of-the-art approaches. Furthermore, comprehensive ablation studies validate the benefits of key design elements within FineLIP.
On Using Deep Learning Proxies as Forward Models in Deep Learning Problems
Jan 16, 2023



Physics-based optimization problems are generally very time-consuming, especially due to the computational complexity associated with the forward model. Recent works have demonstrated that physics-modelling can be approximated with neural networks. However, there is always a certain degree of error associated with this learning, and we study this aspect in this paper. We demonstrate through experiments on popular mathematical benchmarks, that neural network approximations (NN-proxies) of such functions when plugged into the optimization framework, can lead to erroneous results. In particular, we study the behavior of particle swarm optimization and genetic algorithm methods and analyze their stability when coupled with NN-proxies. The correctness of the approximate model depends on the extent of sampling conducted in the parameter space, and through numerical experiments, we demonstrate that caution needs to be taken when constructing this landscape with neural networks. Further, the NN-proxies are hard to train for higher dimensional functions, and we present our insights for 4D and 10D problems. The error is higher for such cases, and we demonstrate that it is sensitive to the choice of the sampling scheme used to build the NN-proxy. The code is available at https://github.com/Fa-ti-ma/NN-proxy-in-optimization.
On the Robustness of 3D Object Detectors
Jul 20, 2022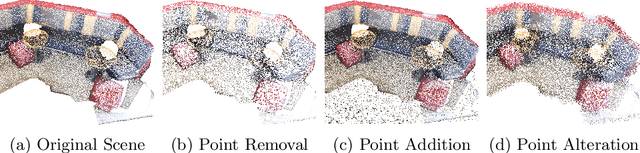

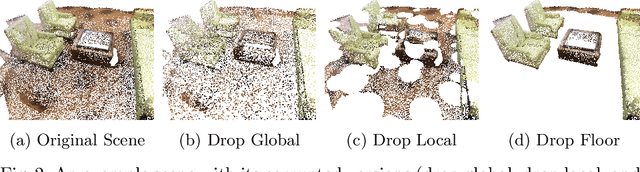
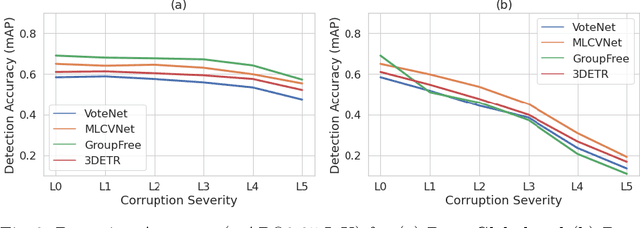
In recent years, significant progress has been achieved for 3D object detection on point clouds thanks to the advances in 3D data collection and deep learning techniques. Nevertheless, 3D scenes exhibit a lot of variations and are prone to sensor inaccuracies as well as information loss during pre-processing. Thus, it is crucial to design techniques that are robust against these variations. This requires a detailed analysis and understanding of the effect of such variations. This work aims to analyze and benchmark popular point-based 3D object detectors against several data corruptions. To the best of our knowledge, we are the first to investigate the robustness of point-based 3D object detectors. To this end, we design and evaluate corruptions that involve data addition, reduction, and alteration. We further study the robustness of different modules against local and global variations. Our experimental results reveal several intriguing findings. For instance, we show that methods that integrate Transformers at a patch or object level lead to increased robustness, compared to using Transformers at the point level.