 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKeyframe Demonstration Seeded and Bayesian Optimized Policy Search
Jan 19, 2023



This paper introduces a novel Learning from Demonstration framework to learn robotic skills with keyframe demonstrations using a Dynamic Bayesian Network (DBN) and a Bayesian Optimized Policy Search approach to improve the learned skills. DBN learns the robot motion, perceptual change in the object of interest (aka skill sub-goals) and the relation between them. The rewards are also learned from the perceptual part of the DBN. The policy search part is a semiblack box algorithm, which we call BO-PI2 . It utilizes the action-perception relation to focus the high-level exploration, uses Gaussian Processes to model the expected-return and performs Upper Confidence Bound type low-level exploration for sampling the rollouts. BO-PI2 is compared against a stateof-the-art method on three different skills in a real robot setting with expert and naive user demonstrations. The results show that our approach successfully focuses the exploration on the failed sub-goals and the addition of reward-predictive exploration outperforms the state-of-the-art approach on cumulative reward, skill success, and termination time metrics.
Frustum Fusion: Pseudo-LiDAR and LiDAR Fusion for 3D Detection
Nov 08, 2021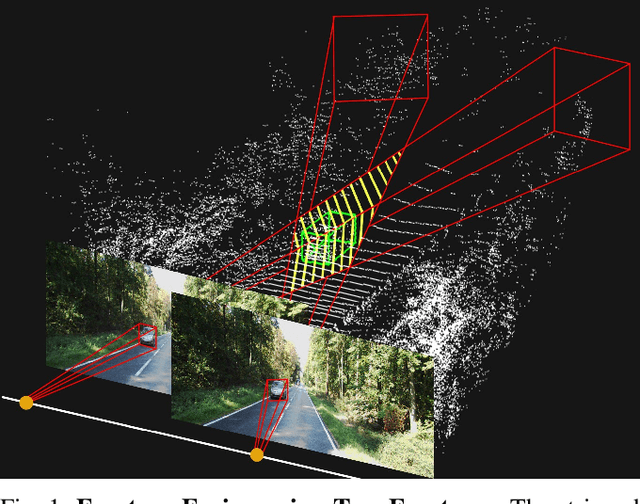
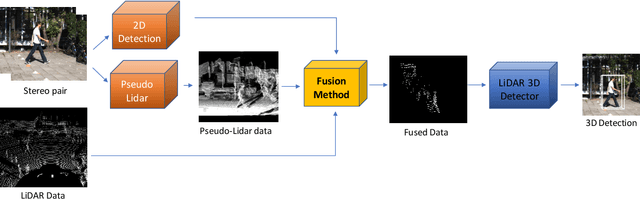

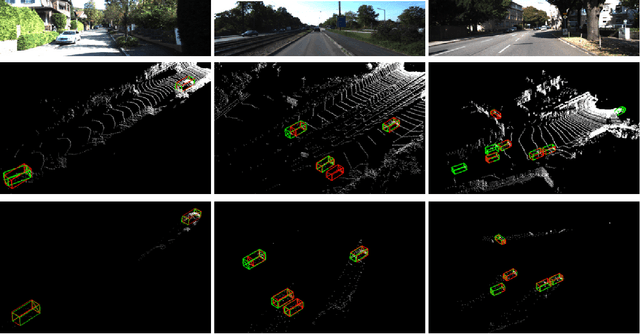
Most autonomous vehicles are equipped with LiDAR sensors and stereo cameras. The former is very accurate but generates sparse data, whereas the latter is dense, has rich texture and color information but difficult to extract robust 3D representations from. In this paper, we propose a novel data fusion algorithm to combine accurate point clouds with dense but less accurate point clouds obtained from stereo pairs. We develop a framework to integrate this algorithm into various 3D object detection methods. Our framework starts with 2D detections from both of the RGB images, calculates frustums and their intersection, creates Pseudo-LiDAR data from the stereo images, and fills in the parts of the intersection region where the LiDAR data is lacking with the dense Pseudo-LiDAR points. We train multiple 3D object detection methods and show that our fusion strategy consistently improves the performance of detectors.
PathoNet: Deep learning assisted evaluation of Ki-67 and tumor infiltrating lymphocytes (TILs) as prognostic factors in breast cancer; A large dataset and baseline
Oct 20, 2020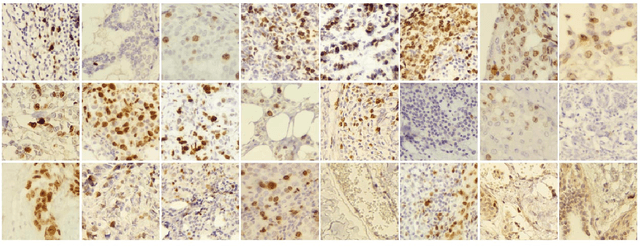
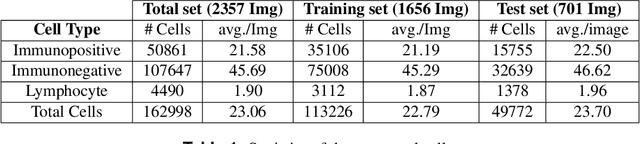
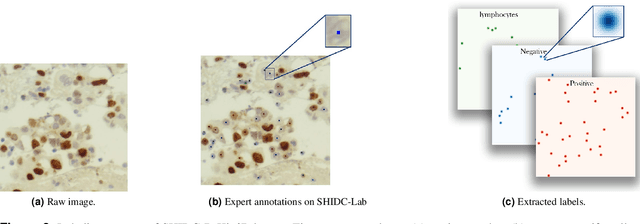

The nuclear protein Ki-67 and Tumor infiltrating lymphocytes (TILs) have been introduced as prognostic factors in predicting tumor progression and its treatment response. The value of the Ki-67 index and TILs in approach to heterogeneous tumors such as Breast cancer (BC), known as the most common cancer in women worldwide, has been highlighted in the literature. Due to the indeterminable and subjective nature of Ki-67 as well as TILs scoring, automated methods using machine learning, specifically approaches based on deep learning, have attracted attention. Yet, deep learning methods need considerable annotated data. In the absence of publicly available benchmarks for BC Ki-67 stained cell detection and further annotated classification of cells, we propose SHIDC-BC-Ki-67 as a dataset for the aforementioned purpose. We also introduce a novel pipeline and a backend, namely PathoNet for Ki-67 immunostained cell detection and classification and simultaneous determination of intratumoral TILs score. Further, we show that despite facing challenges, our proposed backend, PathoNet, outperforms the state of the art methods proposed to date in the harmonic mean measure.
Namira Soccer 2D Simulation Team Description Paper 2020
Jun 24, 2020
In this article, we will discuss methods and ideas which are implemented on Namira 2D Soccer Simulation team in the recent year. Numerous scientific and programming activities were done in the process of code development, but we will mention the most outstanding ones in details. A Kalman filtering method for localization and two helpful software packages will be discussed here. Namira uses agent2d-3.1.1 as base code and librcsc-4.1.0 as library with some deliberate changes.