 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLandmark-based Vehicle Self-Localization Using Automotive Polarimetric Radars
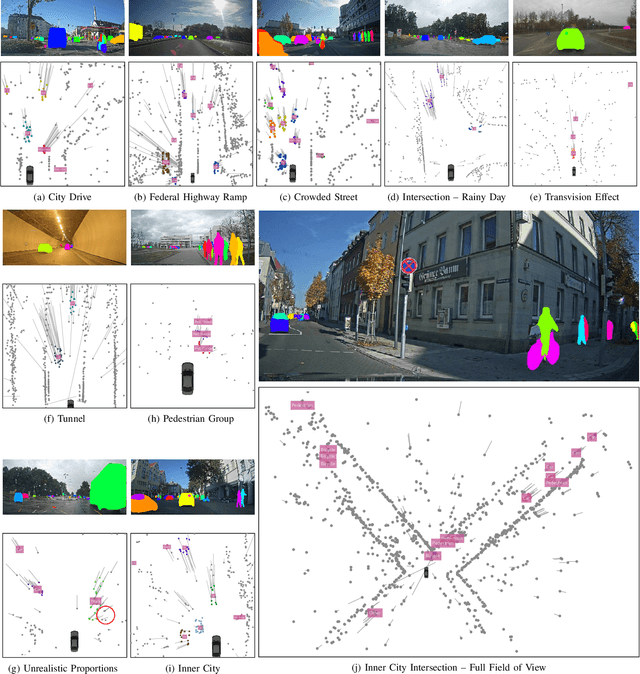
Aug 11, 2024Automotive self-localization is an essential task for any automated driving function. This means that the vehicle has to reliably know its position and orientation with an accuracy of a few centimeters and degrees, respectively. This paper presents a radar-based approach to self-localization, which exploits fully polarimetric scattering information for robust landmark detection. The proposed method requires no input from sensors other than radar during localization for a given map. By association of landmark observations with map landmarks, the vehicle's position is inferred. Abstract point- and line-shaped landmarks allow for compact map sizes and, in combination with the factor graph formulation used, for an efficient implementation. Evaluation of extensive real-world experiments in diverse environments shows a promising overall localization performance of $0.12 \text{m}$ RMS absolute trajectory and $0.43 {}^\circ$ RMS heading error by leveraging the polarimetric information. A comparison of the performance of different levels of polarimetric information proves the advantage in challenging scenarios.
RadarScenes: A Real-World Radar Point Cloud Data Set for Automotive Applications
Apr 06, 2021
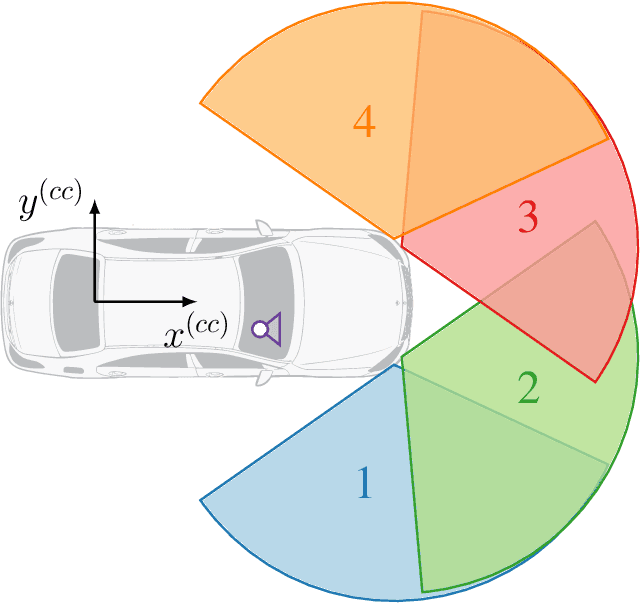
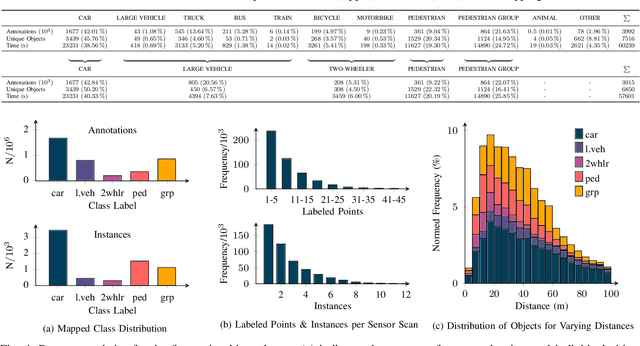
A new automotive radar data set with measurements and point-wise annotations from more than four hours of driving is presented. Data provided by four series radar sensors mounted on one test vehicle were recorded and the individual detections of dynamic objects were manually grouped to clusters and labeled afterwards. The purpose of this data set is to enable the development of novel (machine learning-based) radar perception algorithms with the focus on moving road users. Images of the recorded sequences were captured using a documentary camera. For the evaluation of future object detection and classification algorithms, proposals for score calculation are made so that researchers can evaluate their algorithms on a common basis. Additional information as well as download instructions can be found on the website of the data set: www.radar-scenes.com.