 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolving Learn-to-Race Autonomous Racing Challenge by Planning in Latent Space
Jul 05, 2022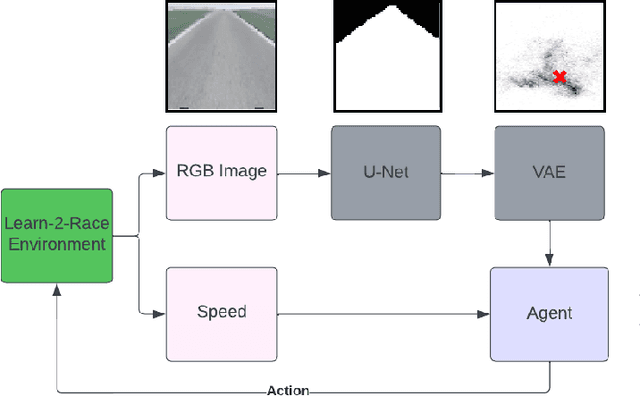
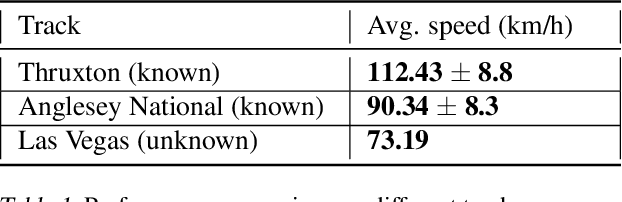
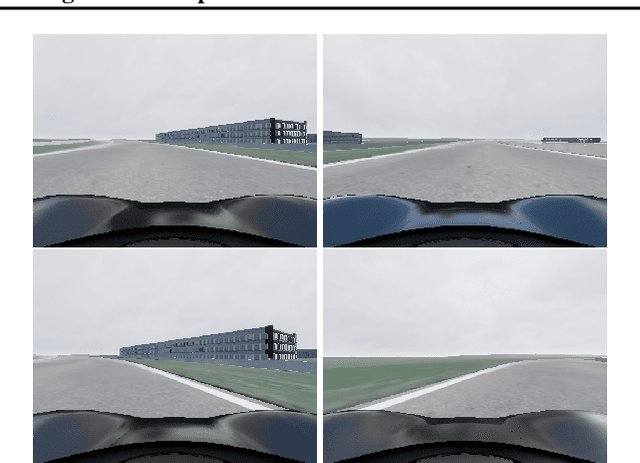
Learn-to-Race Autonomous Racing Virtual Challenge hosted on www<dot>aicrowd<dot>com platform consisted of two tracks: Single and Multi Camera. Our UniTeam team was among the final winners in the Single Camera track. The agent is required to pass the previously unknown F1-style track in the minimum time with the least amount of off-road driving violations. In our approach, we used the U-Net architecture for road segmentation, variational autocoder for encoding a road binary mask, and a nearest-neighbor search strategy that selects the best action for a given state. Our agent achieved an average speed of 105 km/h on stage 1 (known track) and 73 km/h on stage 2 (unknown track) without any off-road driving violations. Here we present our solution and results.