 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Perception for Ambiguous Objects Classification
Aug 02, 2021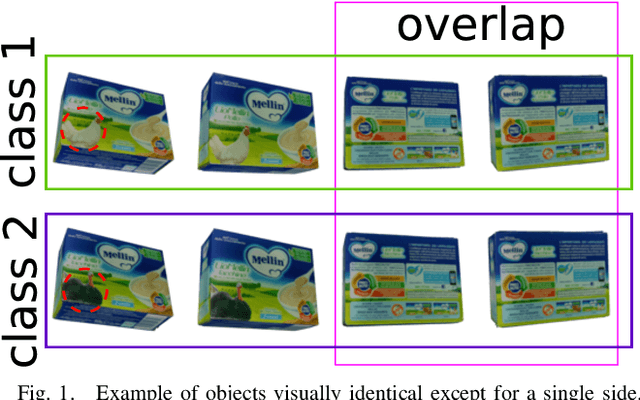
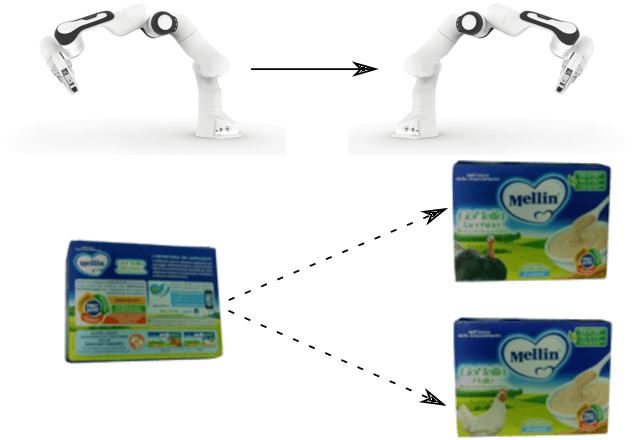
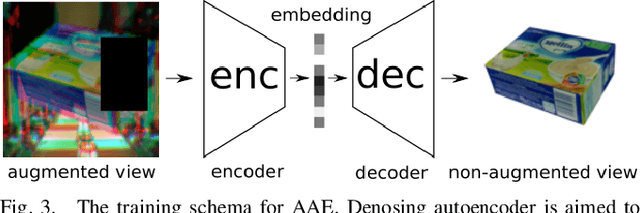
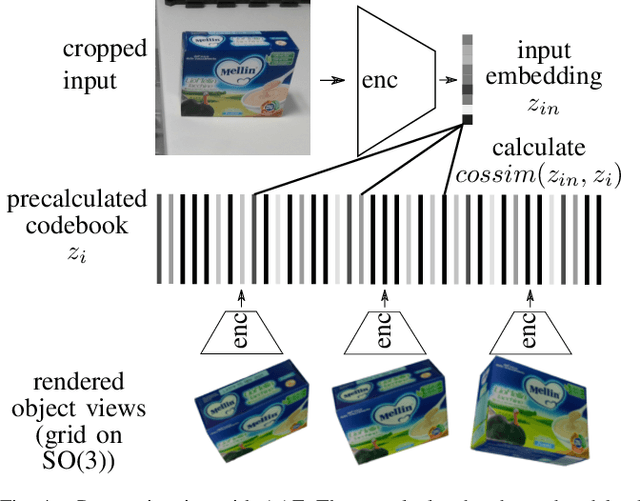
Recent visual pose estimation and tracking solutions provide notable results on popular datasets such as T-LESS and YCB. However, in the real world, we can find ambiguous objects that do not allow exact classification and detection from a single view. In this work, we propose a framework that, given a single view of an object, provides the coordinates of a next viewpoint to discriminate the object against similar ones, if any, and eliminates ambiguities. We also describe a complete pipeline from a real object's scans to the viewpoint selection and classification. We validate our approach with a Franka Emika Panda robot and common household objects featured with ambiguities. We released the source code to reproduce our experiments.
Task Planning with Belief Behavior Trees
Aug 21, 2020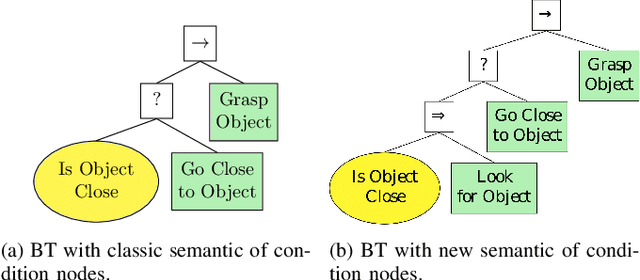
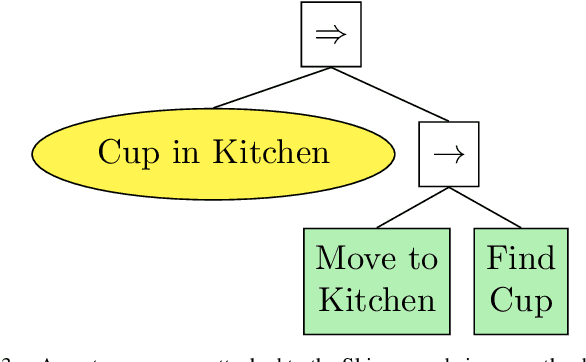
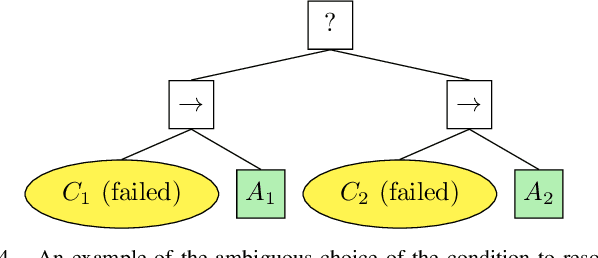
In this paper, we propose Belief Behavior Trees (BBTs), an extension to Behavior Trees (BTs) that allows to automatically create a policy that controls a robot in partially observable environments. We extend the semantic of BTs to account for the uncertainty that affects both the conditions and action nodes of the BT. The tree gets synthesized following a planning strategy for BTs proposed recently: from a set of goal conditions we iteratively select a goal and find the action, or in general the subtree, that satisfies it. Such action may have preconditions that do not hold. For those preconditions, we find an action or subtree in the same fashion. We extend this approach by including, in the planner, actions that have the purpose to reduce the uncertainty that affects the value of a condition node in the BT (for example, turning on the lights to have better lighting conditions). We demonstrate that BBTs allows task planning with non-deterministic outcomes for actions. We provide experimental validation of our approach in a real robotic scenario and - for sake of reproducibility - in a simulated one.
Compact Belief State Representation for Task Planning
Aug 21, 2020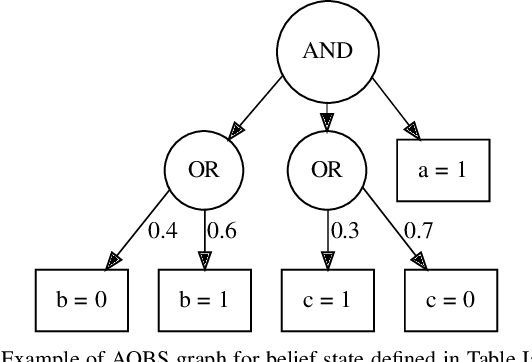
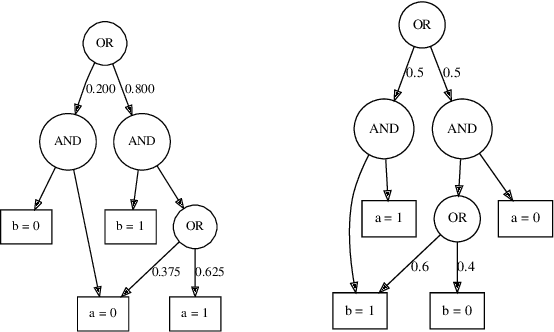
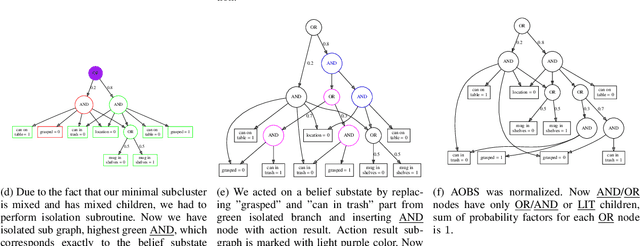
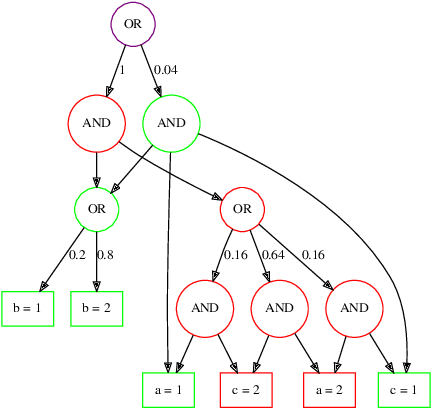
Task planning in a probabilistic belief state domains allows generating complex and robust execution policies in those domains affected by state uncertainty. The performance of a task planner relies on the belief state representation. However, current belief state representation becomes easily intractable as the number of variables and execution time grows. To address this problem, we developed a novel belief state representation based on cartesian product and union operations over belief substates. These two operations and single variable assignment nodes form And-Or directed acyclic graph of Belief State (AOBS). We show how to apply actions with probabilistic outcomes and measure the probability of conditions holding over belief state. We evaluated AOBS performance in simulated forward state space exploration. We compared the size of AOBS with the size of Binary Decision Diagrams (BDD) that were previously used to represent belief state. We show that AOBS representation is not only much more compact than a full belief state but it also scales better than BDD for most of the cases.
Node Templates to improve Reusability and Modularity of Behavior Trees
Feb 08, 2020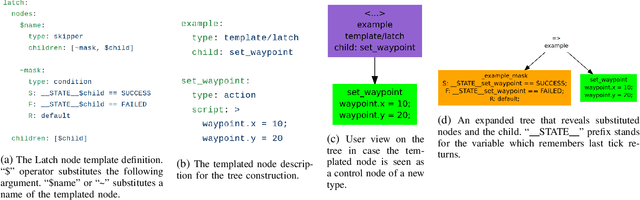

Behavior Trees (BTs) got the robotics society attention not least thanks to their modularity and reusability. The subtrees of BTs could be treated as separate behaviors and therefore reused. We address the following research question: do we exploit the full power of BT on these properties? We suggest to generalise the idea of subtree reuse to "node templates" concept, which allows to represent an arbitrary nodes collection. In addition, previously hardcoded behaviors such as Node* and many Decorator nodes could be implemented in a memory-based BT by node templates.
Asynchronous Behavior Trees with Memory aimed at Aerial Vehicles with Redundancy in Flight Controller
Jun 29, 2019
Complex aircraft systems are becoming a target for automation. For successful operation, they require both efficient and readable mission execution system. Flight control computer (FCC) units, as well as all important subsystems, are often duplicated. Discrete nature of mission execution systems does not allow small differences in data flow among redundant FCCs which are acceptable for continuous control algorithms. Therefore, mission state consistency has to be specifically maintained. We present a novel mission execution system which includes FCC state synchronization. To achieve this result we developed a new concept of Asynchronous Behavior Tree with Memory and proposed a state synchronization algorithm. The implemented system was tested and proven to work in a real-time simulation of High Altitude Pseudo Satellite (HAPS) mission.