 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbodied Evolution in Collective Robotics: A Review
Feb 09, 2018
This paper provides an overview of evolutionary robotics techniques applied to on-line distributed evolution for robot collectives -- namely, embodied evolution. It provides a definition of embodied evolution as well as a thorough description of the underlying concepts and mechanisms. The paper also presents a comprehensive summary of research published in the field since its inception (1999-2017), providing various perspectives to identify the major trends. In particular, we identify a shift from considering embodied evolution as a parallel search method within small robot collectives (fewer than 10 robots) to embodied evolution as an on-line distributed learning method for designing collective behaviours in swarm-like collectives. The paper concludes with a discussion of applications and open questions, providing a milestone for past and an inspiration for future research.
* 23 pages, 1 figure, 1 table
Multi-rendezvous Spacecraft Trajectory Optimization with Beam P-ACO
Apr 03, 2017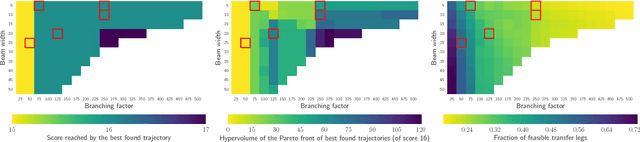
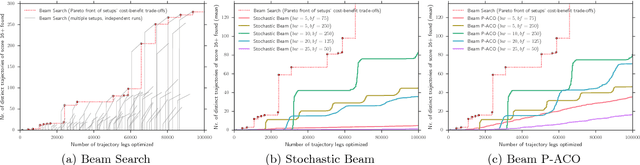
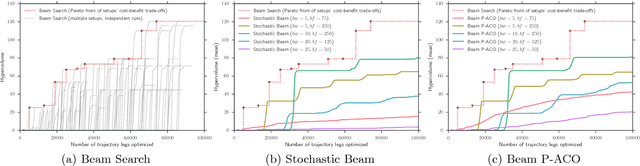
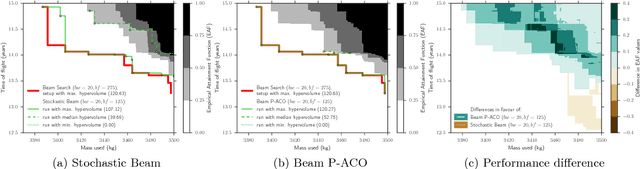
The design of spacecraft trajectories for missions visiting multiple celestial bodies is here framed as a multi-objective bilevel optimization problem. A comparative study is performed to assess the performance of different Beam Search algorithms at tackling the combinatorial problem of finding the ideal sequence of bodies. Special focus is placed on the development of a new hybridization between Beam Search and the Population-based Ant Colony Optimization algorithm. An experimental evaluation shows all algorithms achieving exceptional performance on a hard benchmark problem. It is found that a properly tuned deterministic Beam Search always outperforms the remaining variants. Beam P-ACO, however, demonstrates lower parameter sensitivity, while offering superior worst-case performance. Being an anytime algorithm, it is then found to be the preferable choice for certain practical applications.
* Code available at https://github.com/lfsimoes/beam_paco__gtoc5
Roborobo! a Fast Robot Simulator for Swarm and Collective Robotics
Apr 10, 2013
Roborobo! is a multi-platform, highly portable, robot simulator for large-scale collective robotics experiments. Roborobo! is coded in C++, and follows the KISS guideline ("Keep it simple"). Therefore, its external dependency is solely limited to the widely available SDL library for fast 2D Graphics. Roborobo! is based on a Khepera/ePuck model. It is targeted for fast single and multi-robots simulation, and has already been used in more than a dozen published research mainly concerned with evolutionary swarm robotics, including environment-driven self-adaptation and distributed evolutionary optimization, as well as online onboard embodied evolution and embodied morphogenesis.