 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinding Waldo: Towards Efficient Exploration of NeRF Scene Spaces
Mar 08, 2024Neural Radiance Fields (NeRF) have quickly become the primary approach for 3D reconstruction and novel view synthesis in recent years due to their remarkable performance. Despite the huge interest in NeRF methods, a practical use case of NeRFs has largely been ignored; the exploration of the scene space modelled by a NeRF. In this paper, for the first time in the literature, we propose and formally define the scene exploration framework as the efficient discovery of NeRF model inputs (i.e. coordinates and viewing angles), using which one can render novel views that adhere to user-selected criteria. To remedy the lack of approaches addressing scene exploration, we first propose two baseline methods called Guided-Random Search (GRS) and Pose Interpolation-based Search (PIBS). We then cast scene exploration as an optimization problem, and propose the criteria-agnostic Evolution-Guided Pose Search (EGPS) for efficient exploration. We test all three approaches with various criteria (e.g. saliency maximization, image quality maximization, photo-composition quality improvement) and show that our EGPS performs more favourably than other baselines. We finally highlight key points and limitations, and outline directions for future research in scene exploration.
TrickVOS: A Bag of Tricks for Video Object Segmentation
Jun 28, 2023Space-time memory (STM) network methods have been dominant in semi-supervised video object segmentation (SVOS) due to their remarkable performance. In this work, we identify three key aspects where we can improve such methods; i) supervisory signal, ii) pretraining and iii) spatial awareness. We then propose TrickVOS; a generic, method-agnostic bag of tricks addressing each aspect with i) a structure-aware hybrid loss, ii) a simple decoder pretraining regime and iii) a cheap tracker that imposes spatial constraints in model predictions. Finally, we propose a lightweight network and show that when trained with TrickVOS, it achieves competitive results to state-of-the-art methods on DAVIS and YouTube benchmarks, while being one of the first STM-based SVOS methods that can run in real-time on a mobile device.
LP-IOANet: Efficient High Resolution Document Shadow Removal
Mar 22, 2023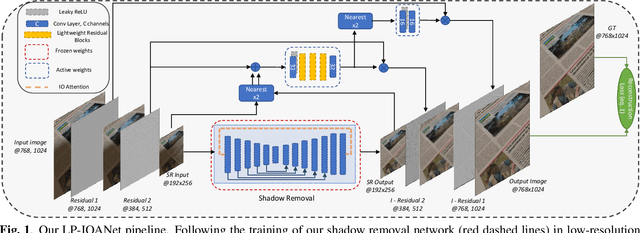

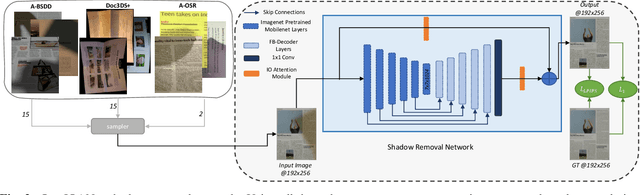

Document shadow removal is an integral task in document enhancement pipelines, as it improves visibility, readability and thus the overall quality. Assuming that the majority of practical document shadow removal scenarios require real-time, accurate models that can produce high-resolution outputs in-the-wild, we propose Laplacian Pyramid with Input/Output Attention Network (LP-IOANet), a novel pipeline with a lightweight architecture and an upsampling module. Furthermore, we propose three new datasets which cover a wide range of lighting conditions, images, shadow shapes and viewpoints. Our results show that we outperform the state-of-the-art by a 35% relative improvement in mean average error (MAE), while running real-time in four times the resolution (of the state-of-the-art method) on a mobile device.