 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot Development and Path Planning for Indoor Ultraviolet Light Disinfection
Apr 12, 2021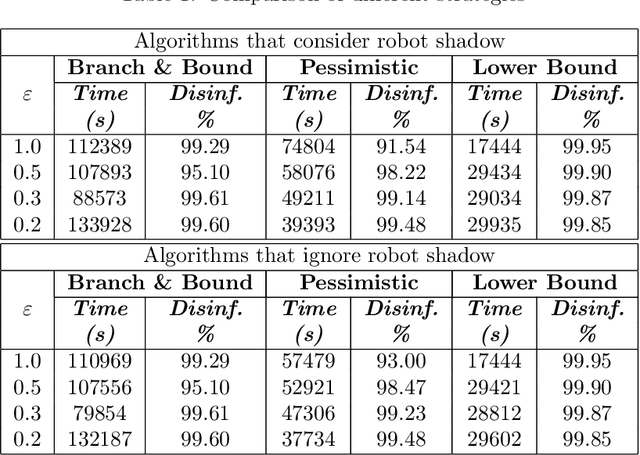
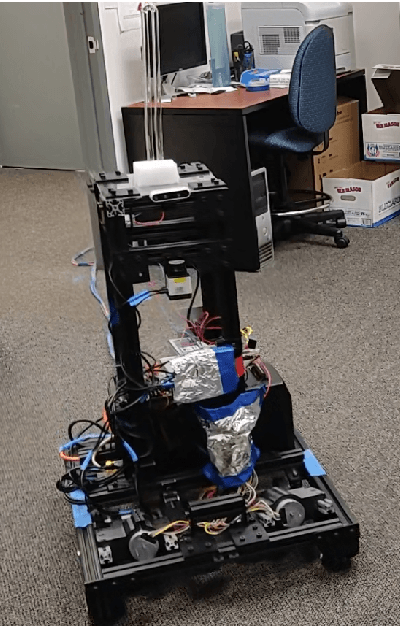
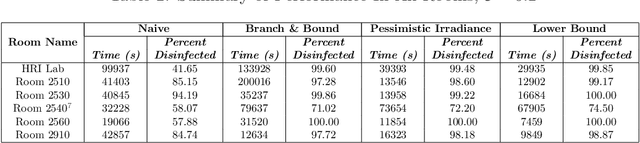

Regular irradiation of indoor environments with ultraviolet C (UVC) light has become a regular task for many indoor settings as a result of COVID-19, but current robotic systems attempting to automate it suffer from high costs and inefficient irradiation. In this paper, we propose a purpose-made inexpensive robotic platform with off-the-shelf components and standard navigation software that, with a novel algorithm for finding optimal irradiation locations, addresses both shortcomings to offer affordable and efficient solutions for UVC irradiation. We demonstrate in simulations the efficacy of the algorithm and show a prototypical run of the autonomous integrated robotic system in an indoor environment. In our sample instances, our proposed algorithm reduces the time needed by roughly 30\% while it increases the coverage by a factor of 35\% (when compared to the best possible placement of a static light).
"Can you do this?" Self-Assessment Dialogues with Autonomous Robots Before, During, and After a Mission
May 04, 2020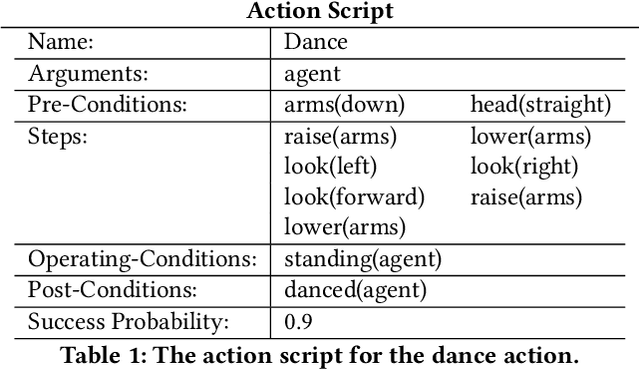
Autonomous robots with sophisticated capabilities can make it difficult for human instructors to assess its capabilities and proficiencies. Therefore, it is important future robots have the ability to: introspect on their capabilities and assess their task performance. Introspection allows the robot to determine what it can accomplish and self-assessment allows the robot estimate the likelihood it will accomplish at given task. We introduce a general framework for introspection and self-assessment that enables robots to have task and performance-based dialogues before, during, and after a mission. We then realize aspects of the framework in the cognitive robotic DIARC architecture, and finally show a proof-of-concept demonstration on a Nao robot showing its self-assessment capabilities before, during, and after an instructed task.
Augmenting Robot Knowledge Consultants with Distributed Short Term Memory
Nov 26, 2018Human-robot communication in situated environments involves a complex interplay between knowledge representations across a wide variety of modalities. Crucially, linguistic information must be associated with representations of objects, locations, people, and goals, which may be represented in very different ways. In previous work, we developed a Consultant Framework that facilitates modality-agnostic access to information distributed across a set of heterogeneously represented knowledge sources. In this work, we draw inspiration from cognitive science to augment these distributed knowledge sources with Short Term Memory Buffers to create an STM-augmented algorithm for referring expression generation. We then discuss the potential performance benefits of this approach and insights from cognitive science that may inform future refinements in the design of our approach.