 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Can you do this?" Self-Assessment Dialogues with Autonomous Robots Before, During, and After a Mission
Paper and Code
May 04, 2020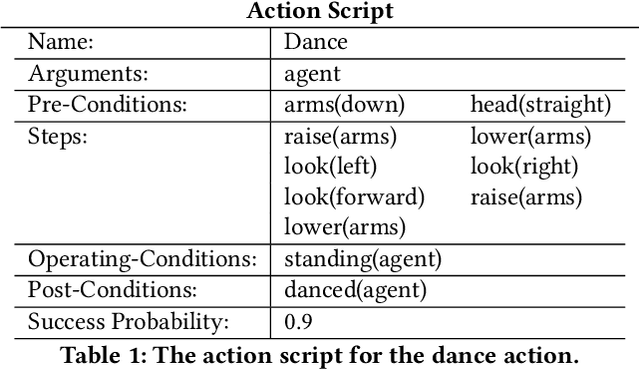
Autonomous robots with sophisticated capabilities can make it difficult for human instructors to assess its capabilities and proficiencies. Therefore, it is important future robots have the ability to: introspect on their capabilities and assess their task performance. Introspection allows the robot to determine what it can accomplish and self-assessment allows the robot estimate the likelihood it will accomplish at given task. We introduce a general framework for introspection and self-assessment that enables robots to have task and performance-based dialogues before, during, and after a mission. We then realize aspects of the framework in the cognitive robotic DIARC architecture, and finally show a proof-of-concept demonstration on a Nao robot showing its self-assessment capabilities before, during, and after an instructed task.