 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocal Neural Descriptor Fields: Locally Conditioned Object Representations for Manipulation
Feb 07, 2023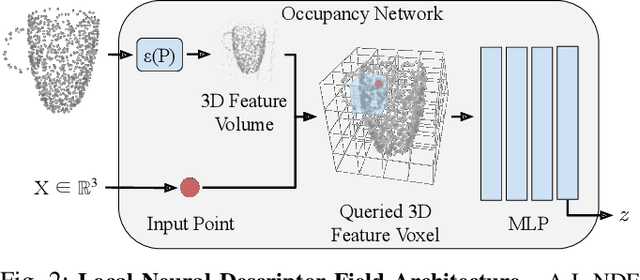

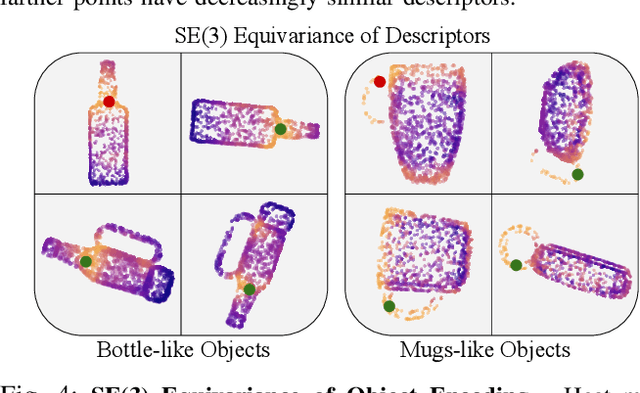
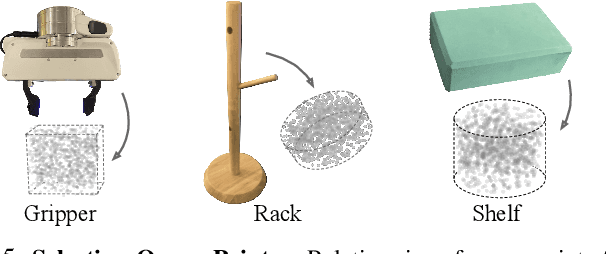
A robot operating in a household environment will see a wide range of unique and unfamiliar objects. While a system could train on many of these, it is infeasible to predict all the objects a robot will see. In this paper, we present a method to generalize object manipulation skills acquired from a limited number of demonstrations, to novel objects from unseen shape categories. Our approach, Local Neural Descriptor Fields (L-NDF), utilizes neural descriptors defined on the local geometry of the object to effectively transfer manipulation demonstrations to novel objects at test time. In doing so, we leverage the local geometry shared between objects to produce a more general manipulation framework. We illustrate the efficacy of our approach in manipulating novel objects in novel poses -- both in simulation and in the real world.