 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuromorphic BrailleNet: Accurate and Generalizable Braille Reading Beyond Single Characters through Event-Based Optical Tactile Sensing
Jan 27, 2026Conventional robotic Braille readers typically rely on discrete, character-by-character scanning, limiting reading speed and disrupting natural flow. Vision-based alternatives often require substantial computation, introduce latency, and degrade in real-world conditions. In this work, we present a high accuracy, real-time pipeline for continuous Braille recognition using Evetac, an open-source neuromorphic event-based tactile sensor. Unlike frame-based vision systems, the neuromorphic tactile modality directly encodes dynamic contact events during continuous sliding, closely emulating human finger-scanning strategies. Our approach combines spatiotemporal segmentation with a lightweight ResNet-based classifier to process sparse event streams, enabling robust character recognition across varying indentation depths and scanning speeds. The proposed system achieves near-perfect accuracy (>=98%) at standard depths, generalizes across multiple Braille board layouts, and maintains strong performance under fast scanning. On a physical Braille board containing daily-living vocabulary, the system attains over 90% word-level accuracy, demonstrating robustness to temporal compression effects that challenge conventional methods. These results position neuromorphic tactile sensing as a scalable, low latency solution for robotic Braille reading, with broader implications for tactile perception in assistive and robotic applications.
Evetac: An Event-based Optical Tactile Sensor for Robotic Manipulation
Dec 02, 2023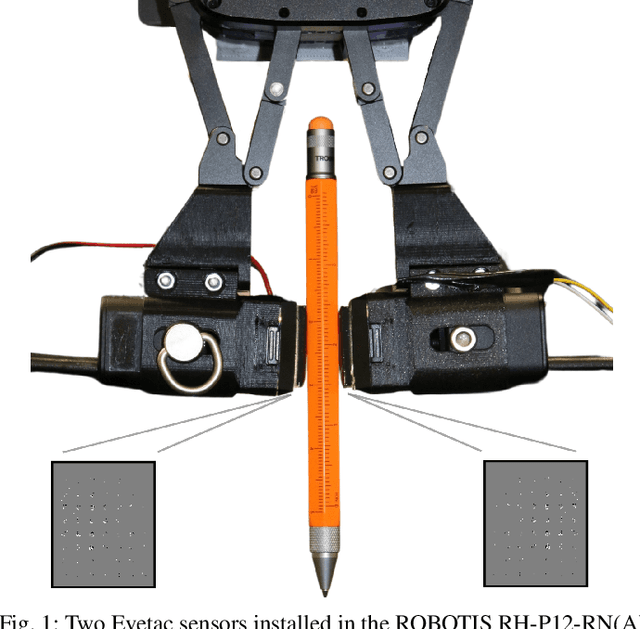
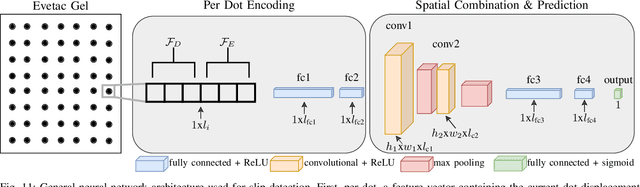
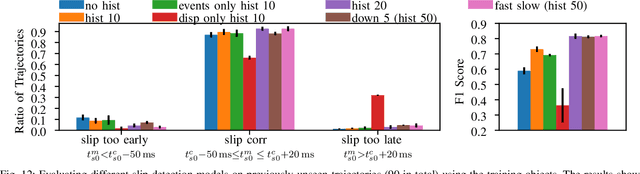
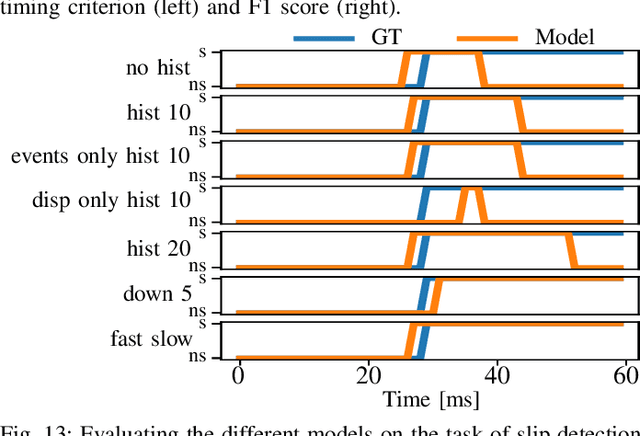
Optical tactile sensors have recently become popular. They provide high spatial resolution, but struggle to offer fine temporal resolutions. To overcome this shortcoming, we study the idea of replacing the RGB camera with an event-based camera and introduce a new event-based optical tactile sensor called Evetac. Along with hardware design, we develop touch processing algorithms to process its measurements online at 1000 Hz. We devise an efficient algorithm to track the elastomer's deformation through the imprinted markers despite the sensor's sparse output. Benchmarking experiments demonstrate Evetac's capabilities of sensing vibrations up to 498 Hz, reconstructing shear forces, and significantly reducing data rates compared to RGB optical tactile sensors. Moreover, Evetac's output and the marker tracking provide meaningful features for learning data-driven slip detection and prediction models. The learned models form the basis for a robust and adaptive closed-loop grasp controller capable of handling a wide range of objects. We believe that fast and efficient event-based tactile sensors like Evetac will be essential for bringing human-like manipulation capabilities to robotics. The sensor design is open-sourced at https://sites.google.com/view/evetac .