 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFauna Sprout: A lightweight, approachable, developer-ready humanoid robot
Jan 26, 2026Recent advances in learned control, large-scale simulation, and generative models have accelerated progress toward general-purpose robotic controllers, yet the field still lacks platforms suitable for safe, expressive, long-term deployment in human environments. Most existing humanoids are either closed industrial systems or academic prototypes that are difficult to deploy and operate around people, limiting progress in robotics. We introduce Sprout, a developer platform designed to address these limitations through an emphasis on safety, expressivity, and developer accessibility. Sprout adopts a lightweight form factor with compliant control, limited joint torques, and soft exteriors to support safe operation in shared human spaces. The platform integrates whole-body control, manipulation with integrated grippers, and virtual-reality-based teleoperation within a unified hardware-software stack. An expressive head further enables social interaction -- a domain that remains underexplored on most utilitarian humanoids. By lowering physical and technical barriers to deployment, Sprout expands access to capable humanoid platforms and provides a practical basis for developing embodied intelligence in real human environments.
A Clinical Tuning Framework for Continuous Kinematic and Impedance Control of a Powered Knee-Ankle Prosthesis
Dec 13, 2024Objective: Configuring a prosthetic leg is an integral part of the fitting process, but the personalization of a multi-modal powered knee-ankle prosthesis is often too complex to realize in a clinical environment. This paper develops both the technical means to individualize a hybrid kinematic-impedance controller for variable-incline walking and sit-stand transitions, and an intuitive Clinical Tuning Interface (CTI) that allows prosthetists to directly modify the controller behavior. Methods: Utilizing an established method for predicting kinematic gait individuality alongside a new parallel approach for kinetic individuality, we applied tuned characteristics exclusively from level-ground walking to personalize continuous-phase/task models of joint kinematics and impedance. To take advantage of this method, we developed a CTI that translates common clinical tuning parameters into model adjustments. We then conducted a case study involving an above-knee amputee participant where a prosthetist iteratively tuned the prosthesis in a simulated clinical session involving walking and sit-stand transitions. Results: The prosthetist fully tuned the multi-activity prosthesis controller in under 20 min. Each iteration of tuning (i.e., observation, parameter adjustment, and model reprocessing) took 2 min on average for walking and 1 min on average for sit-stand. The tuned behavior changes were appropriately manifested in the commanded prosthesis torques, both at the tuned tasks and across untuned tasks (inclines). Conclusion: The CTI leveraged able-bodied trends to efficiently personalize a wide array of walking tasks and sit-stand transitions. A case-study validated the CTI tuning method and demonstrated the efficiency necessary for powered knee-ankle prostheses to become clinically viable.
Lower-limb kinematics and kinetics during continuously varying human locomotion
Aug 27, 2021

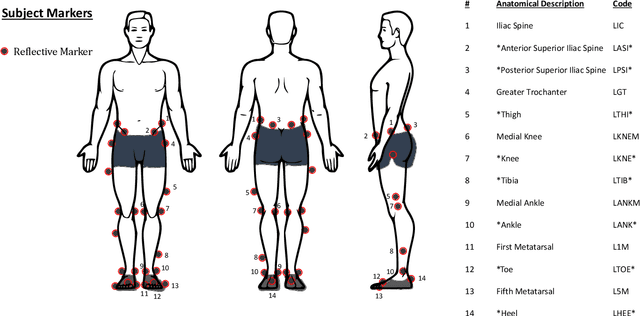

Human locomotion involves continuously variable activities including walking, running, and stair climbing over a range of speeds and inclinations as well as sit-stand, walk-run, and walk-stairs transitions. Understanding the kinematics and kinetics of the lower limbs during continuously varying locomotion is fundamental to developing robotic prostheses and exoskeletons that assist in community ambulation. However, available datasets on human locomotion neglect transitions between activities and/or continuous variations in speed and inclination during these activities. This data paper reports a new dataset that includes the lower-limb kinematics and kinetics of ten able-bodied participants walking at multiple inclines ($\pm$ 0, 5, 10 $^{\circ}$) and speeds (0.8, 1, 1.2 m/s), running at multiple speeds (1.8, 2, 2.2, 2.4 m/s), walking and running with constant acceleration ($\pm$ 0.2, 0.5 $\text{m/s^2}$), and stair ascent/descent with multiple stair inclines (20, 25, 30, 35 $^{\circ}$). This dataset also includes sit-stand transitions, walk-run transitions, and walk-stairs transitions. Data were recorded by a Vicon motion capture system and, for applicable tasks, a Bertec instrumented treadmill.
A Phase Variable Approach for Improved Rhythmic and Non-Rhythmic Control of a Powered Knee-Ankle Prosthesis
Apr 12, 2019
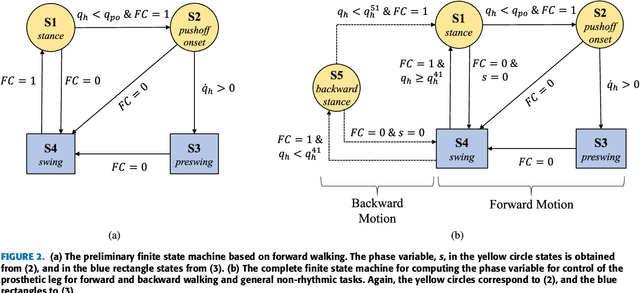
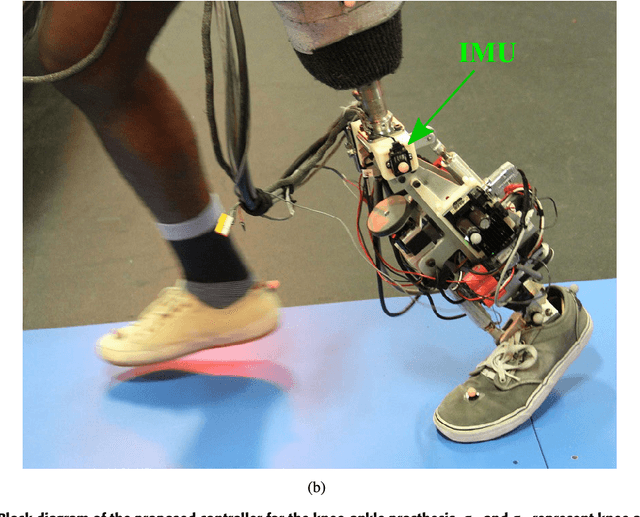
Although there has been recent progress in control of multi-joint prosthetic legs for rhythmic tasks such as walking, control of these systems for non-rhythmic motions and general real-world maneuvers is still an open problem. In this article, we develop a new controller that is capable of both rhythmic (constant-speed) walking, transitions between speeds and/or tasks, and some common volitional leg motions. We introduce a new piecewise holonomic phase variable, which, through a finite state machine, forms the basis of our controller. The phase variable is constructed by measuring the thigh angle, and the transitions in the finite state machine are formulated through sensing foot contact along with attributes of a nominal reference gait trajectory. The controller was implemented on a powered knee-ankle prosthesis and tested with a transfemoral amputee subject, who successfully performed a wide range of rhythmic and non-rhythmic tasks, including slow and fast walking, quick start and stop, backward walking, walking over obstacles, and kicking a soccer ball. Use of the powered leg resulted in clinically significant reductions in amputee compensations for rhythmic tasks (including vaulting and hip circumduction) when compared to use of the take-home passive leg. In addition, considerable improvements were also observed in the performance for non-rhythmic tasks. The proposed approach is expected to provide a better understanding of rhythmic and non-rhythmic motions in a unified framework, which in turn can lead to more reliable control of multi-joint prostheses for a wider range of real-world tasks.