 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Activity Recognition Framework for Continuous Monitoring of Non-Steady-State Locomotion of Individuals with Parkinson's Disease
Oct 08, 2021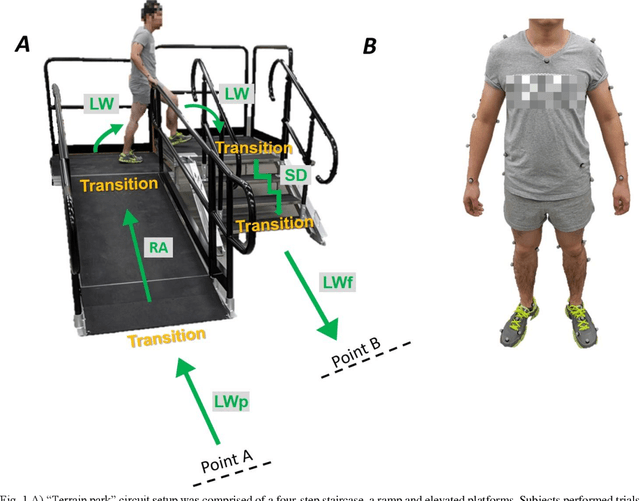
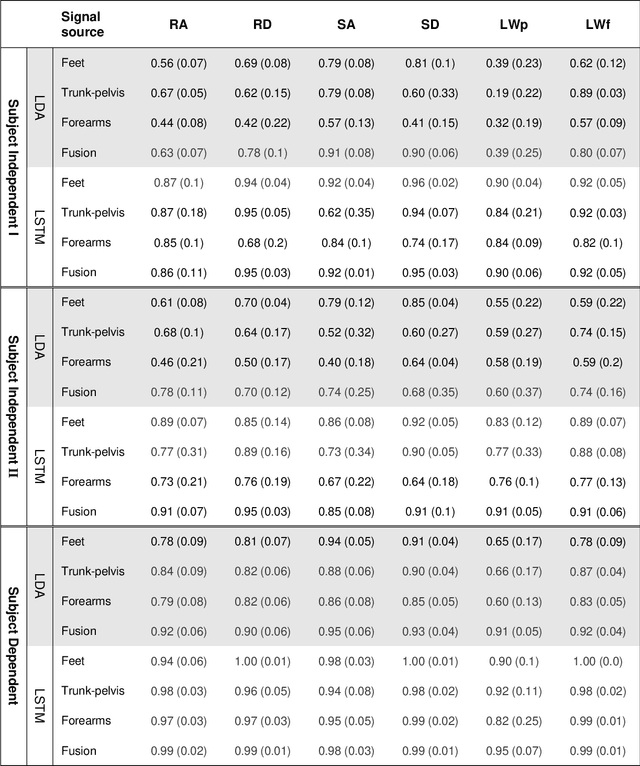
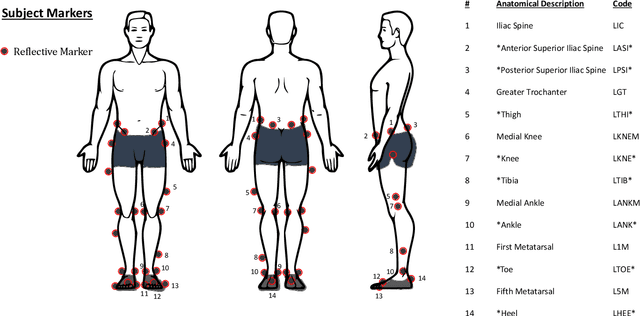
Fundamental knowledge in activity recognition of individuals with motor disorders such as Parkinson's disease (PD) has been primarily limited to detection of steady-state/static tasks (sitting, standing, walking). To date, identification of non-steady-state locomotion on uneven terrains (stairs, ramps) has not received much attention. Furthermore, previous research has mainly relied on data from a large number of body locations which could adversely affect user convenience and system performance. Here, individuals with mild stages of PD and healthy subjects performed non-steady-state circuit trials comprising stairs, ramp, and changes of direction. An offline analysis using a linear discriminant analysis (LDA) classifier and a Long-Short Term Memory (LSTM) neural network was performed for task recognition. The performance of accelerographic and gyroscopic information from varied lower/upper-body segments were tested across a set of user-independent and user-dependent training paradigms. Comparing the F1 score of a given signal across classifiers showed improved performance using LSTM compared to LDA. Using LSTM, even a subset of information (e.g., feet data) in subject-independent training appeared to provide F1 score > 0.8. However, employing LDA was shown to be at the expense of being limited to using a subject-dependent training and/or biomechanical data from multiple body locations. The findings could inform a number of applications in the field of healthcare monitoring and developing advanced lower-limb assistive devices by providing insights into classification schemes capable of handling non-steady-state and unstructured locomotion in individuals with mild Parkinson's disease.
Lower-limb kinematics and kinetics during continuously varying human locomotion
Aug 27, 2021


Human locomotion involves continuously variable activities including walking, running, and stair climbing over a range of speeds and inclinations as well as sit-stand, walk-run, and walk-stairs transitions. Understanding the kinematics and kinetics of the lower limbs during continuously varying locomotion is fundamental to developing robotic prostheses and exoskeletons that assist in community ambulation. However, available datasets on human locomotion neglect transitions between activities and/or continuous variations in speed and inclination during these activities. This data paper reports a new dataset that includes the lower-limb kinematics and kinetics of ten able-bodied participants walking at multiple inclines ($\pm$ 0, 5, 10 $^{\circ}$) and speeds (0.8, 1, 1.2 m/s), running at multiple speeds (1.8, 2, 2.2, 2.4 m/s), walking and running with constant acceleration ($\pm$ 0.2, 0.5 $\text{m/s^2}$), and stair ascent/descent with multiple stair inclines (20, 25, 30, 35 $^{\circ}$). This dataset also includes sit-stand transitions, walk-run transitions, and walk-stairs transitions. Data were recorded by a Vicon motion capture system and, for applicable tasks, a Bertec instrumented treadmill.
Task-Invariant Learning of Continuous Joint Kinematics during Steady-State and Transient Ambulation Using Ultrasound Sensing
Apr 01, 2021



Natural control of limb motion is continuous and progressively adaptive to individual intent. While intuitive interfaces have the potential to rely on the neuromuscular input by the user for continuous adaptation, continuous volitional control of assistive devices that can generalize across various tasks has not been addressed. In this study, we propose a method to use spatiotemporal ultrasound features of the rectus femoris and vastus intermedius muscles of able-bodied individuals for task-invariant learning of continuous knee kinematics during steady-state and transient ambulation. The task-invariant learning paradigm was statistically evaluated against a task-specific paradigm for the steady-state (1) level-walk, (2) incline, (3) decline, (4) stair ascent, and (5) stair descent ambulation tasks. The transitions between steady-state stair ambulation and level-ground walking were also investigated. It was observed that the continuous knee kinematics can be learned using a task-invariant learning paradigm with statistically comparable accuracy to a task-specific paradigm. Statistical analysis further revealed that incorporating the temporal ultrasound features significantly improves the accuracy of continuous estimations (p < 0.05). The average root mean square errors (RMSEs) of knee angle and angular velocity estimation were 7.06{\deg} and 53.1{\deg}/sec, respectively, for the task-invariant learning compared to 6.00{\deg} and 51.8{\deg}/sec for the task-specific models. High accuracy of continuous task-invariant paradigms overcome the barrier of task-specific control schemes and motivate the implementation of direct volitional control of lower-limb assistive devices using ultrasound sensing, which may eventually enhance the intuitiveness and functionality of these devices towards a "free form" control approach.