 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Voluntary Motion with Modular, Backdrivable, Powered Hip and Knee Orthoses
Oct 04, 2021
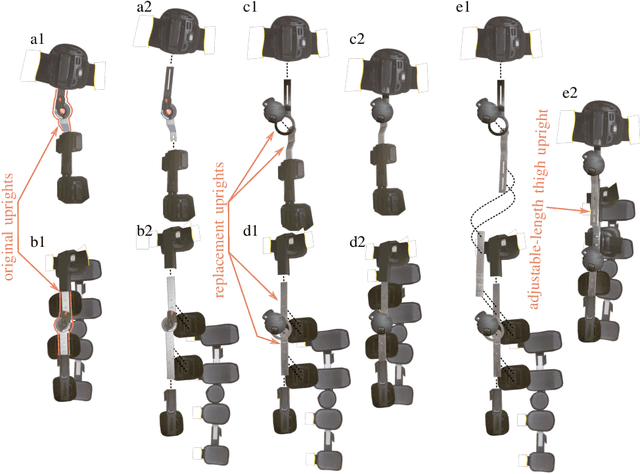
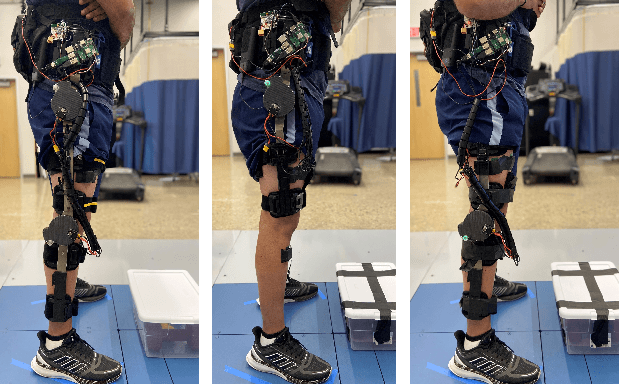
Mobility disabilities are prominent in society with wide-ranging detriments to affected individuals. Addressing the specific deficits of individuals within this heterogeneous population requires modular, partial-assist, lower-limb exoskeletons. This paper introduces the Modular Backdrivable Lower-limb Unloading Exoskeleton (M-BLUE), which implements high torque, low mechanical impedance actuators on commercial orthoses with sheet metal modifications to produce a variety of hip- and/or knee-assisting configurations. Benchtop system identification verifies the desirable backdrive properties of the actuator, and allows for torque prediction within 0.4 Nm. An able-bodied human subject experiment demonstrates that three unilateral configurations of M-BLUE (hip only, knee only, and hip-knee) with a simple gravity compensation controller can reduce muscle EMG readings in a lifting and lowering task relative to the bare condition. Reductions in mean muscular effort and peak muscle activation were seen across the primary squat musculature (excluding biceps femoris), demonstrating the potential to reduce fatigue leading to poor lifting posture. These promising results motivate applications of M-BLUE to additional subject populations such as hip/knee osteoarthritis and geriatric frailty, and the expansion of M-BLUE to bilateral and ankle configurations.
A Phase Variable Approach for Improved Rhythmic and Non-Rhythmic Control of a Powered Knee-Ankle Prosthesis
Apr 12, 2019
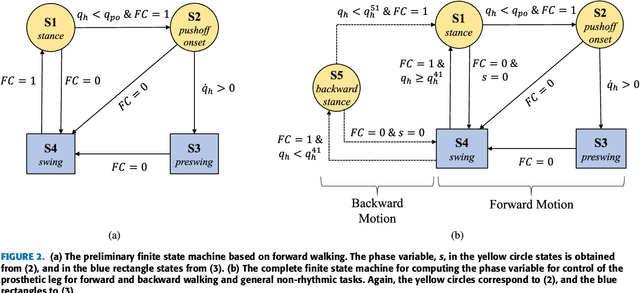
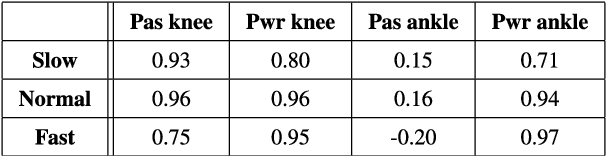
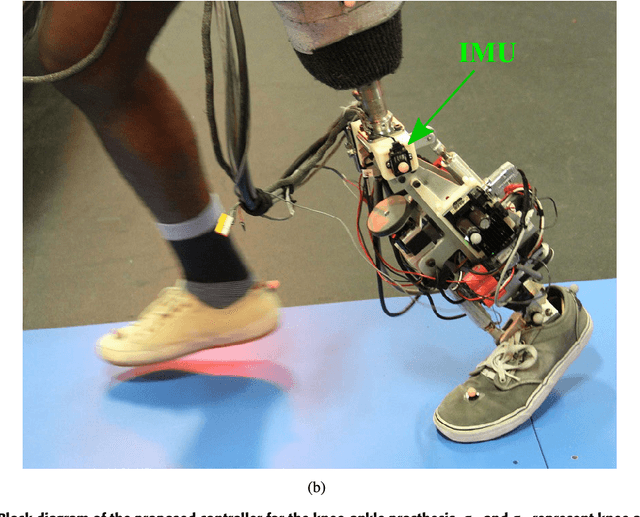
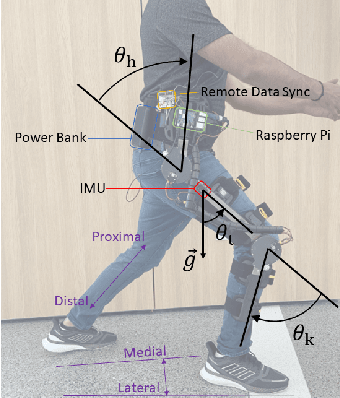
Although there has been recent progress in control of multi-joint prosthetic legs for rhythmic tasks such as walking, control of these systems for non-rhythmic motions and general real-world maneuvers is still an open problem. In this article, we develop a new controller that is capable of both rhythmic (constant-speed) walking, transitions between speeds and/or tasks, and some common volitional leg motions. We introduce a new piecewise holonomic phase variable, which, through a finite state machine, forms the basis of our controller. The phase variable is constructed by measuring the thigh angle, and the transitions in the finite state machine are formulated through sensing foot contact along with attributes of a nominal reference gait trajectory. The controller was implemented on a powered knee-ankle prosthesis and tested with a transfemoral amputee subject, who successfully performed a wide range of rhythmic and non-rhythmic tasks, including slow and fast walking, quick start and stop, backward walking, walking over obstacles, and kicking a soccer ball. Use of the powered leg resulted in clinically significant reductions in amputee compensations for rhythmic tasks (including vaulting and hip circumduction) when compared to use of the take-home passive leg. In addition, considerable improvements were also observed in the performance for non-rhythmic tasks. The proposed approach is expected to provide a better understanding of rhythmic and non-rhythmic motions in a unified framework, which in turn can lead to more reliable control of multi-joint prostheses for a wider range of real-world tasks.