 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Voluntary Motion with Modular, Backdrivable, Powered Hip and Knee Orthoses
Oct 04, 2021
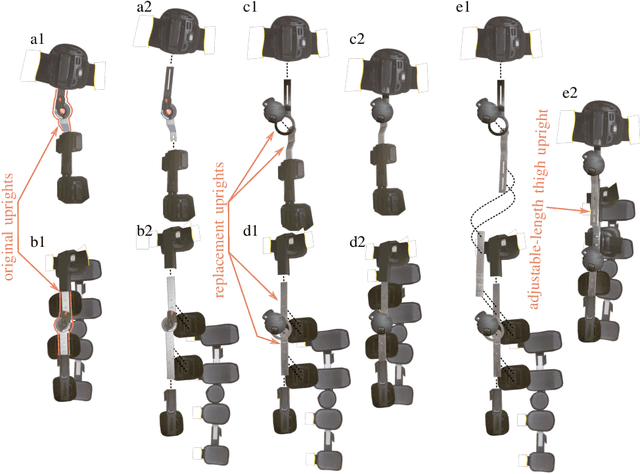
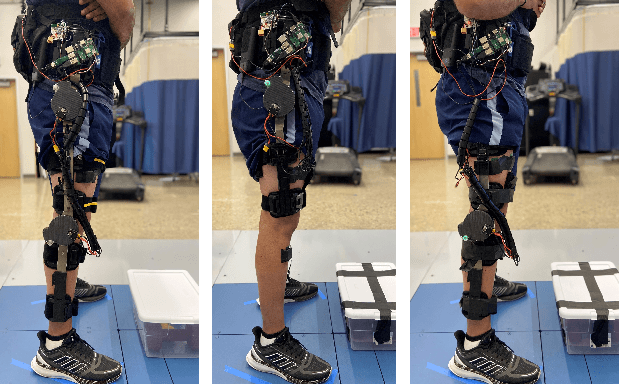
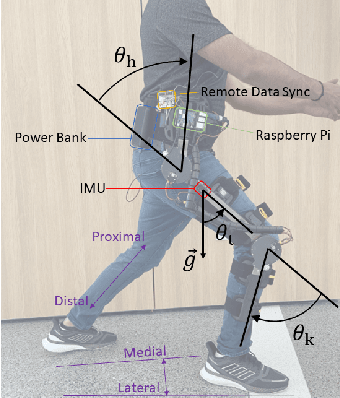
Mobility disabilities are prominent in society with wide-ranging detriments to affected individuals. Addressing the specific deficits of individuals within this heterogeneous population requires modular, partial-assist, lower-limb exoskeletons. This paper introduces the Modular Backdrivable Lower-limb Unloading Exoskeleton (M-BLUE), which implements high torque, low mechanical impedance actuators on commercial orthoses with sheet metal modifications to produce a variety of hip- and/or knee-assisting configurations. Benchtop system identification verifies the desirable backdrive properties of the actuator, and allows for torque prediction within 0.4 Nm. An able-bodied human subject experiment demonstrates that three unilateral configurations of M-BLUE (hip only, knee only, and hip-knee) with a simple gravity compensation controller can reduce muscle EMG readings in a lifting and lowering task relative to the bare condition. Reductions in mean muscular effort and peak muscle activation were seen across the primary squat musculature (excluding biceps femoris), demonstrating the potential to reduce fatigue leading to poor lifting posture. These promising results motivate applications of M-BLUE to additional subject populations such as hip/knee osteoarthritis and geriatric frailty, and the expansion of M-BLUE to bilateral and ankle configurations.